 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwo-Step mmWave Positioning Scheme with RIS-Part I: Angle Estimation and Analysis
Paper and Code
Aug 16, 2022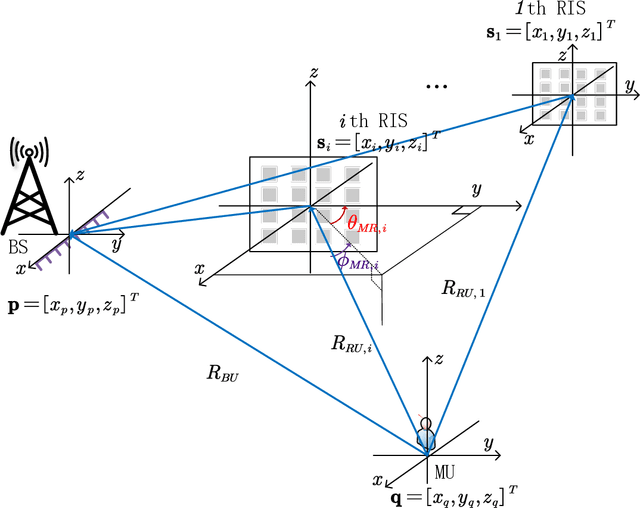
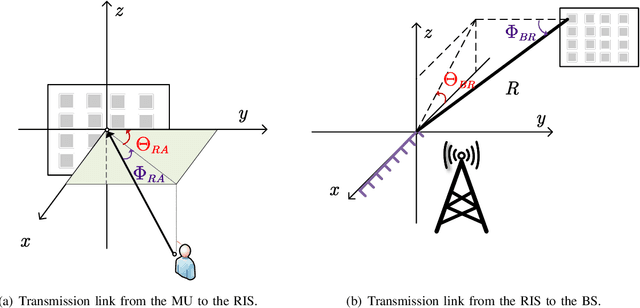
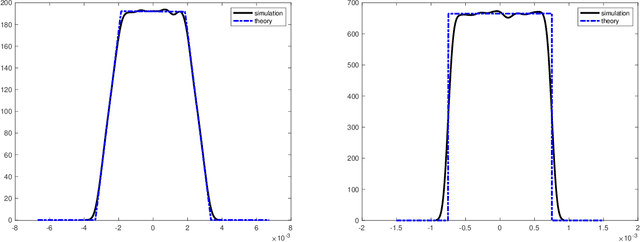
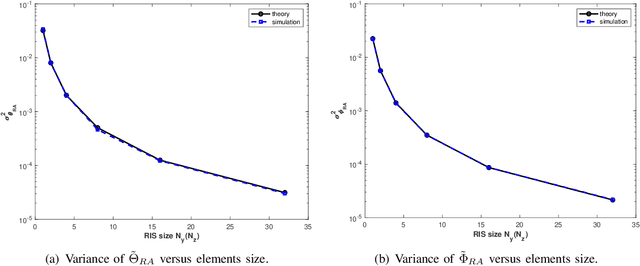
In this series of work, we propose a comprehensive two-step three-dimensional (3D) positioning scheme in a millimeter wave (mmWave) system, where the reconfigurable intelligent surface (RIS) is leveraged to enhance the positioning performance of mobile users (MUs). Specifically, the first step is the estimation error modeling and analysis based on the two-dimensional discrete Fourier transform (2D-DFT) angle estimation technique, while the second step is the corresponding positioning algorithm design and bias analysis. The first step is introduced in this paper, and the second step is investigated in Part II of this series work. Based on 2D-DFT angle estimation, the angle estimation error is modeled and analyzed by deriving its probability density functions (PDF). More specifically, we first derive the PDF by using the geometric relationship between the angles of arrival (AOAs) and their triangle functions. Then, we simplify the intricate expression of the PDF of the AOA estimation error by employing the first-order linear approximation of triangle functions. Finally, we derive a complex expression for the variance based on the derived PDF. Distinctively, for the azimuth estimation error, the variance is separately integrated according to the different non-zero intervals of the PDF, which will be used in the second part of this series work for the analysis of the position estimation error. Extensive simulation results are also presented to verify the accuracy of the derived results.