 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMFCalib: Single-shot and Automatic Extrinsic Calibration for LiDAR and Camera in Targetless Environments Based on Multi-Feature Edge
Paper and Code
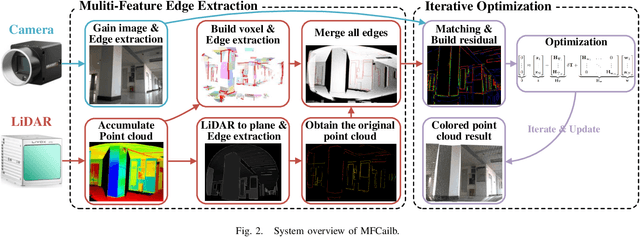
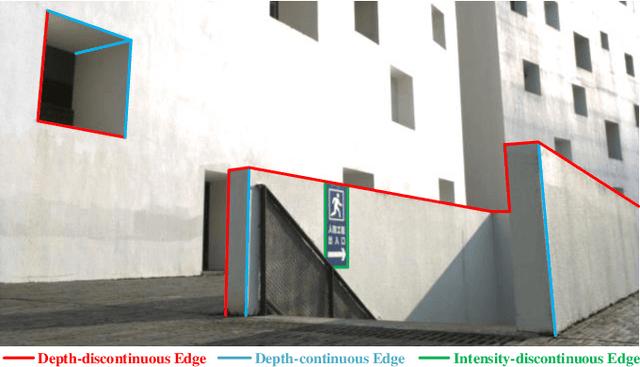
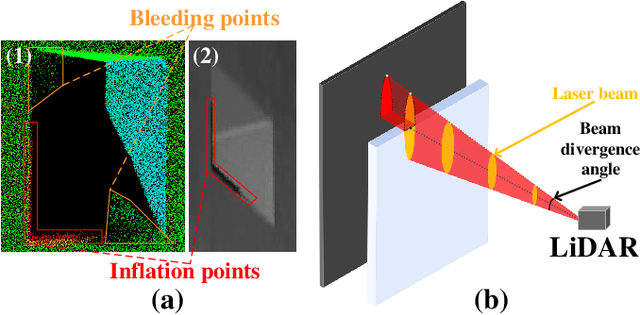
This paper presents MFCalib, an innovative extrinsic calibration technique for LiDAR and RGB camera that operates automatically in targetless environments with a single data capture. At the heart of this method is using a rich set of edge information, significantly enhancing calibration accuracy and robustness. Specifically, we extract both depth-continuous and depth-discontinuous edges, along with intensity-discontinuous edges on planes. This comprehensive edge extraction strategy ensures our ability to achieve accurate calibration with just one round of data collection, even in complex and varied settings. Addressing the uncertainty of depth-discontinuous edges, we delve into the physical measurement principles of LiDAR and develop a beam model, effectively mitigating the issue of edge inflation caused by the LiDAR beam. Extensive experiment results demonstrate that MFCalib outperforms the state-of-the-art targetless calibration methods across various scenes, achieving and often surpassing the precision of multi-scene calibrations in a single-shot collection. To support community development, we make our code available open-source on GitHub.