 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMFCalib: Single-shot and Automatic Extrinsic Calibration for LiDAR and Camera in Targetless Environments Based on Multi-Feature Edge
Sep 02, 2024
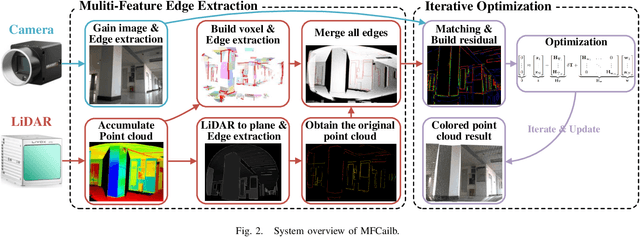
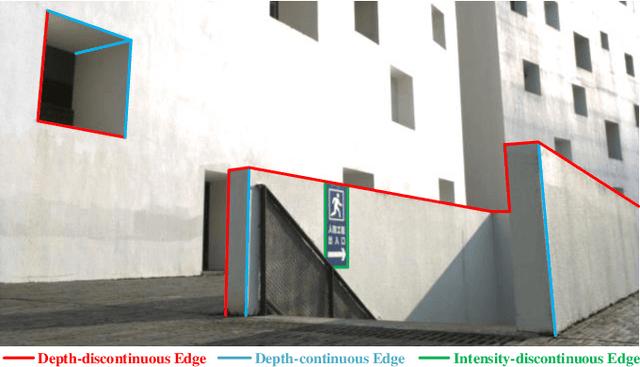
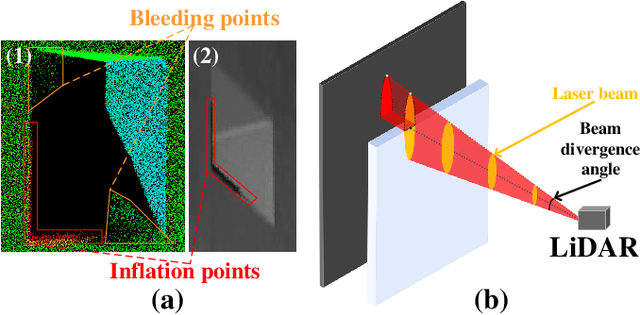
This paper presents MFCalib, an innovative extrinsic calibration technique for LiDAR and RGB camera that operates automatically in targetless environments with a single data capture. At the heart of this method is using a rich set of edge information, significantly enhancing calibration accuracy and robustness. Specifically, we extract both depth-continuous and depth-discontinuous edges, along with intensity-discontinuous edges on planes. This comprehensive edge extraction strategy ensures our ability to achieve accurate calibration with just one round of data collection, even in complex and varied settings. Addressing the uncertainty of depth-discontinuous edges, we delve into the physical measurement principles of LiDAR and develop a beam model, effectively mitigating the issue of edge inflation caused by the LiDAR beam. Extensive experiment results demonstrate that MFCalib outperforms the state-of-the-art targetless calibration methods across various scenes, achieving and often surpassing the precision of multi-scene calibrations in a single-shot collection. To support community development, we make our code available open-source on GitHub.
Resilient Output Consensus Control of Heterogeneous Multi-agent Systems against Byzantine Attacks: A Twin Layer Approach
Mar 22, 2023

This paper studies the problem of cooperative control of heterogeneous multi-agent systems (MASs) against Byzantine attacks. The agent affected by Byzantine attacks sends different wrong values to all neighbors while applying wrong input signals for itself, which is aggressive and difficult to be defended. Inspired by the concept of Digital Twin, a new hierarchical protocol equipped with a virtual twin layer (TL) is proposed, which decouples the above problems into the defense scheme against Byzantine edge attacks on the TL and the defense scheme against Byzantine node attacks on the cyber-physical layer (CPL). On the TL, we propose a resilient topology reconfiguration strategy by adding a minimum number of key edges to improve network resilience. It is strictly proved that the control strategy is sufficient to achieve asymptotic consensus in finite time with the topology on the TL satisfying strongly $(2f+1)$-robustness. On the CPL, decentralized chattering-free controllers are proposed to guarantee the resilient output consensus for the heterogeneous MASs against Byzantine node attacks. Moreover, the obtained controller shows exponential convergence. The effectiveness and practicality of the theoretical results are verified by numerical examples.
Data-Driven Leader-following Consensus for Nonlinear Multi-Agent Systems against Composite Attacks: A Twins Layer Approach
Mar 22, 2023This paper studies the leader-following consensuses of uncertain and nonlinear multi-agent systems against composite attacks (CAs), including Denial of Service (DoS) attacks and actuation attacks (AAs). A double-layer control framework is formulated, where a digital twin layer (TL) is added beside the traditional cyber-physical layer (CPL), inspired by the recent Digital Twin technology. Consequently, the resilient control task against CAs can be divided into two parts: One is distributed estimation against DoS attacks on the TL and the other is resilient decentralized tracking control against actuation attacks on the CPL. %The data-driven scheme is used to deal with both model non-linearity and model uncertainty, in which only the input and output data of the system are employed throughout the whole control process. First, a distributed observer based on switching estimation law against DoS is designed on TL. Second, a distributed model free adaptive control (DMFAC) protocol based on attack compensation against AAs is designed on CPL. Moreover, the uniformly ultimately bounded convergence of consensus error of the proposed double-layer DMFAC algorithm is strictly proved. Finally, the simulation verifies the effectiveness of the resilient double-layer control scheme.
Resilient Output Containment Control of Heterogeneous Multiagent Systems Against Composite Attacks: A Digital Twin Approach
Mar 22, 2023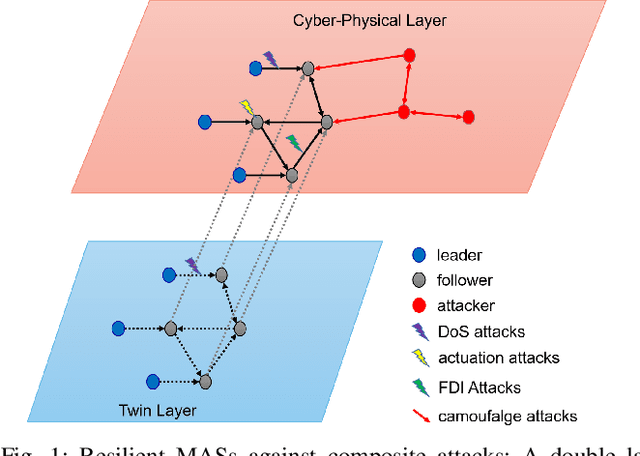

This paper studies the distributed resilient output containment control of heterogeneous multiagent systems against composite attacks, including denial-of-services (DoS) attacks, false-data injection (FDI) attacks, camouflage attacks, and actuation attacks. Inspired by digital twins, a twin layer (TL) with higher security and privacy is used to decouple the above problem into two tasks: defense protocols against DoS attacks on TL and defense protocols against actuation attacks on cyber-physical layer (CPL). First, considering modeling errors of leader dynamics, we introduce distributed observers to reconstruct the leader dynamics for each follower on TL under DoS attacks. Second, distributed estimators are used to estimate follower states according to the reconstructed leader dynamics on the TL. Third, according to the reconstructed leader dynamics, we design decentralized solvers that calculate the output regulator equations on CPL. Fourth, decentralized adaptive attack-resilient control schemes that resist unbounded actuation attacks are provided on CPL. Furthermore, we apply the above control protocols to prove that the followers can achieve uniformly ultimately bounded (UUB) convergence, and the upper bound of the UUB convergence is determined explicitly. Finally, two simulation examples are provided to show the effectiveness of the proposed control protocols.
Resilient Path Planning of UAVs against Covert Attacks on UWB Sensors
Feb 28, 2021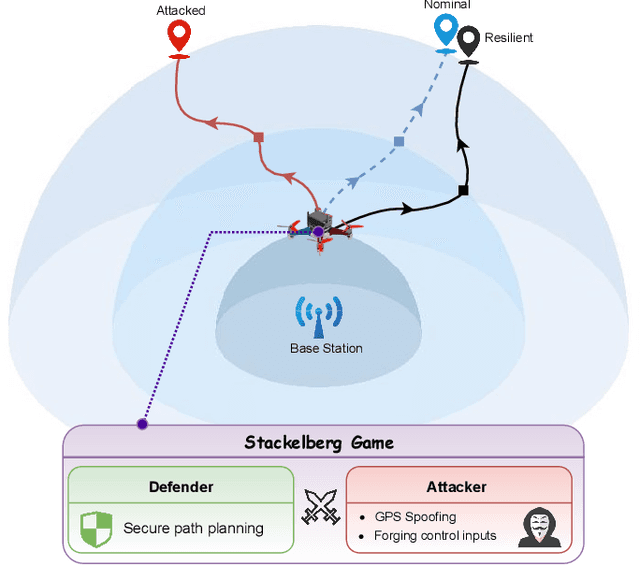
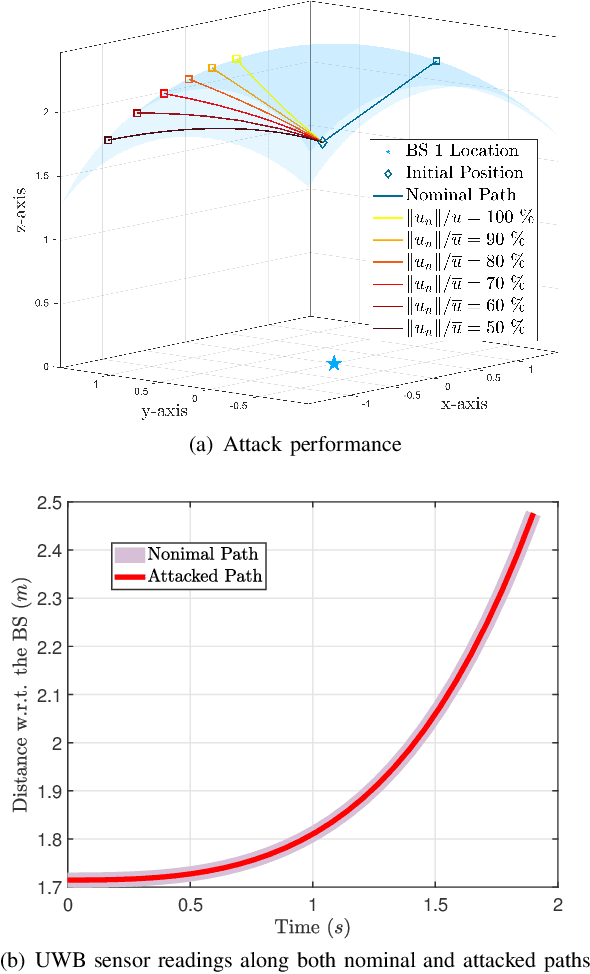
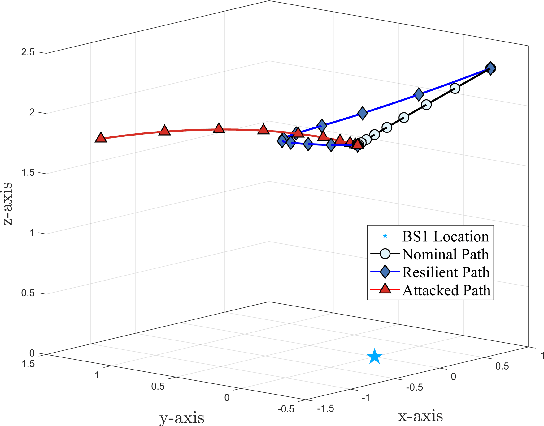
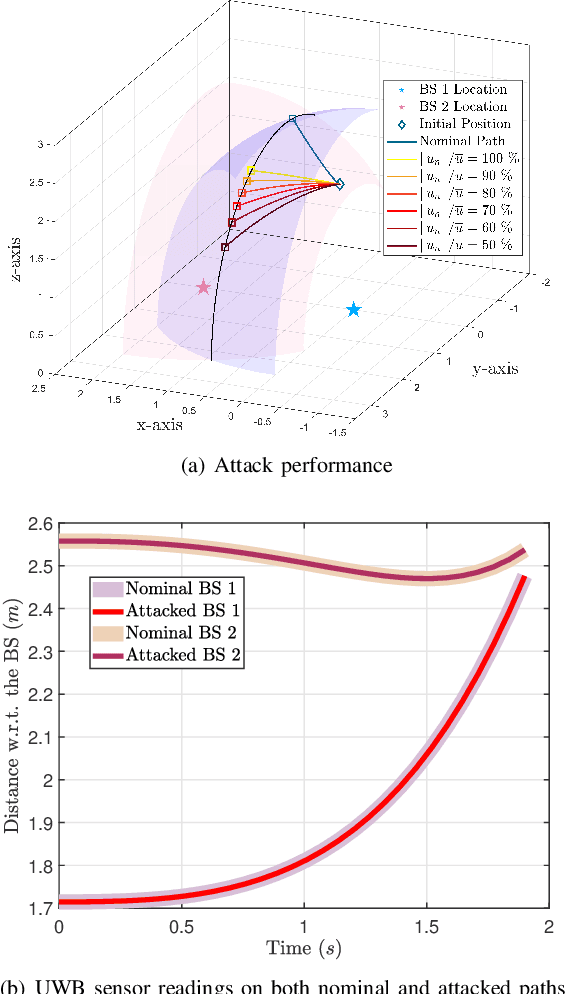
In this letter, a resilient path planning scheme is proposed to navigate a UAV to the planned (nominal) destination with minimum energy-consumption in the presence of a smart attacker. The UAV is equipped with two sensors, a GPS sensor, which is vulnerable to the spoofing attacker, and a well-functioning Ultra-Wideband (UWB) sensor, which is possible to be fooled. We show that a covert attacker can significantly deviate the UAV's path by simultaneously corrupting the GPS signals and forging control inputs without being detected by the UWB sensor. The prerequisite for the attack occurrence is first discussed. Based on this prerequisite, the optimal attack scheme is proposed, which maximizes the deviation between the nominal destination and the real one. Correspondingly, an energy-efficient and resilient navigation scheme based on Pontryagin's maximum principle \cite{gelfand2000calculus} is formulated, which depresses the above covert attacker effectively. To sum up, this problem can be seen as a Stackelberg game \cite{bacsar1998dynamic} between a secure path planner (defender) and a covert attacker. The effectiveness and practicality of our theoretical results are illustrated via two series of simulation examples and a UAV experiment.