 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResilient Path Planning of UAVs against Covert Attacks on UWB Sensors
Paper and Code
Feb 28, 2021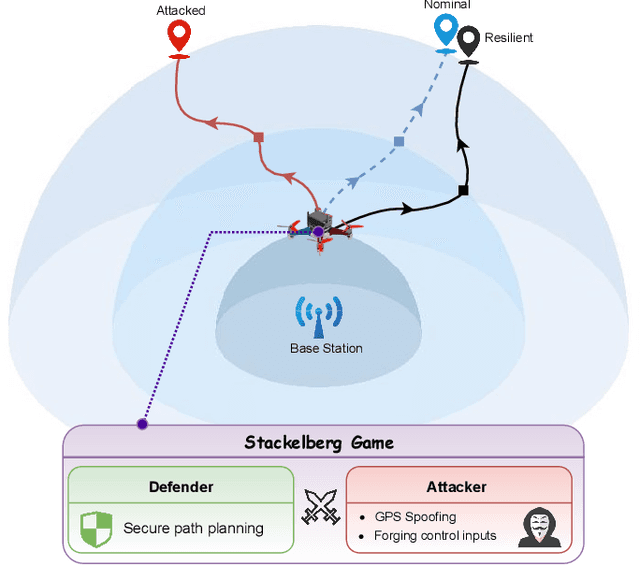
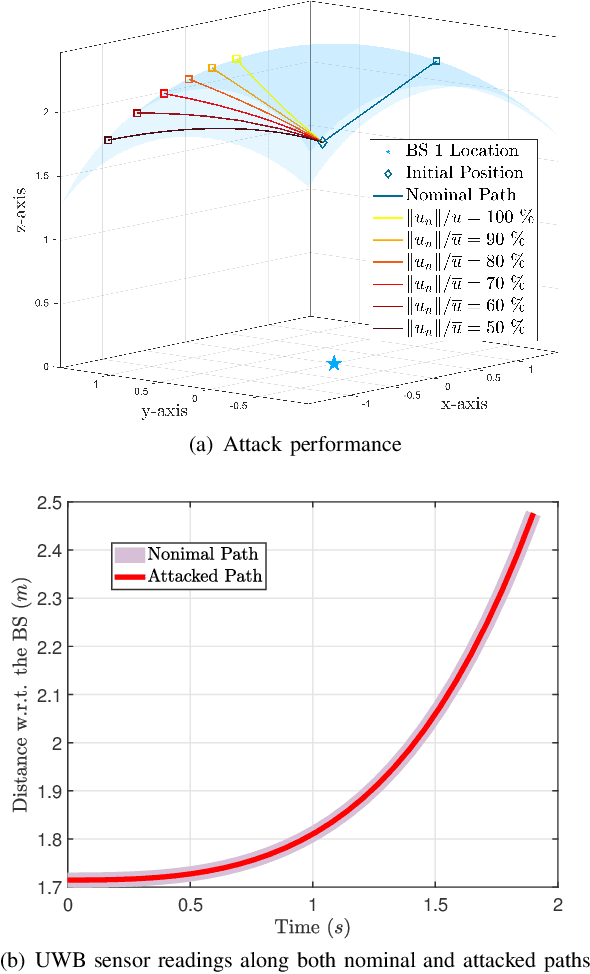
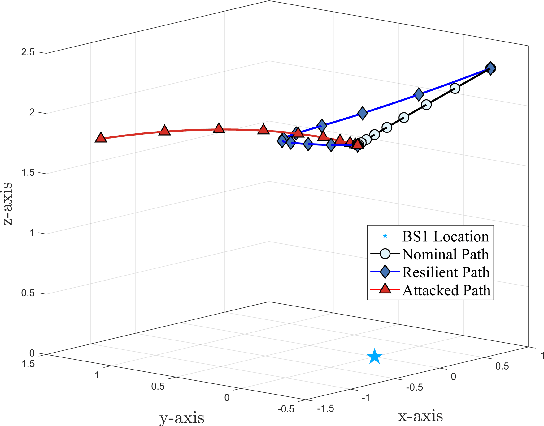
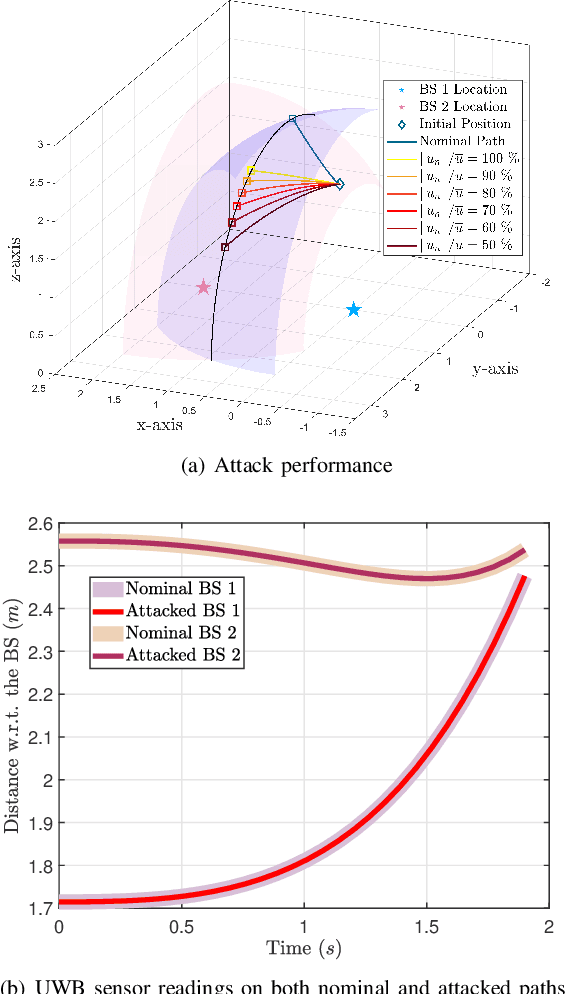
In this letter, a resilient path planning scheme is proposed to navigate a UAV to the planned (nominal) destination with minimum energy-consumption in the presence of a smart attacker. The UAV is equipped with two sensors, a GPS sensor, which is vulnerable to the spoofing attacker, and a well-functioning Ultra-Wideband (UWB) sensor, which is possible to be fooled. We show that a covert attacker can significantly deviate the UAV's path by simultaneously corrupting the GPS signals and forging control inputs without being detected by the UWB sensor. The prerequisite for the attack occurrence is first discussed. Based on this prerequisite, the optimal attack scheme is proposed, which maximizes the deviation between the nominal destination and the real one. Correspondingly, an energy-efficient and resilient navigation scheme based on Pontryagin's maximum principle \cite{gelfand2000calculus} is formulated, which depresses the above covert attacker effectively. To sum up, this problem can be seen as a Stackelberg game \cite{bacsar1998dynamic} between a secure path planner (defender) and a covert attacker. The effectiveness and practicality of our theoretical results are illustrated via two series of simulation examples and a UAV experiment.