 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFAST-LIVO2 on Resource-Constrained Platforms: LiDAR-Inertial-Visual Odometry with Efficient Memory and Computation
Paper and Code
Jan 23, 2025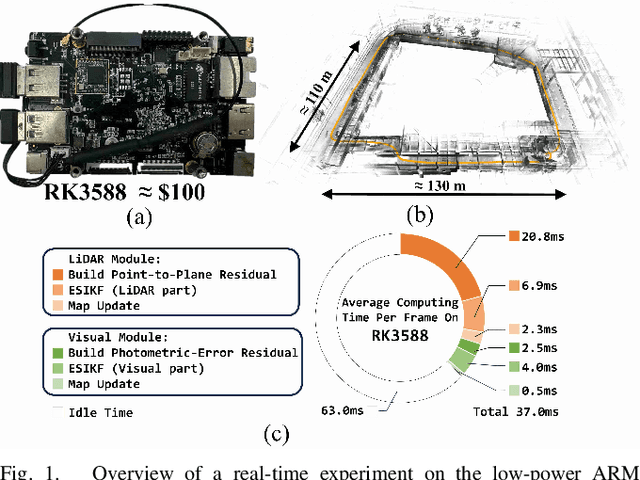
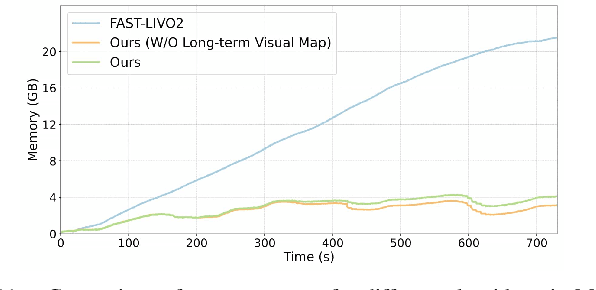
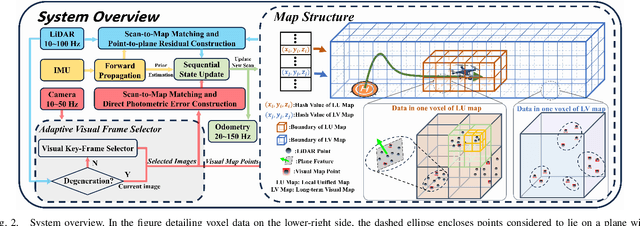
This paper presents a lightweight LiDAR-inertial-visual odometry system optimized for resource-constrained platforms. It integrates a degeneration-aware adaptive visual frame selector into error-state iterated Kalman filter (ESIKF) with sequential updates, improving computation efficiency significantly while maintaining a similar level of robustness. Additionally, a memory-efficient mapping structure combining a locally unified visual-LiDAR map and a long-term visual map achieves a good trade-off between performance and memory usage. Extensive experiments on x86 and ARM platforms demonstrate the system's robustness and efficiency. On the Hilti dataset, our system achieves a 33% reduction in per-frame runtime and 47% lower memory usage compared to FAST-LIVO2, with only a 3 cm increase in RMSE. Despite this slight accuracy trade-off, our system remains competitive, outperforming state-of-the-art (SOTA) LIO methods such as FAST-LIO2 and most existing LIVO systems. These results validate the system's capability for scalable deployment on resource-constrained edge computing platforms.