 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncorporating Domain Knowledge through Task Augmentation for Front-End JavaScript Code Generation
Aug 23, 2022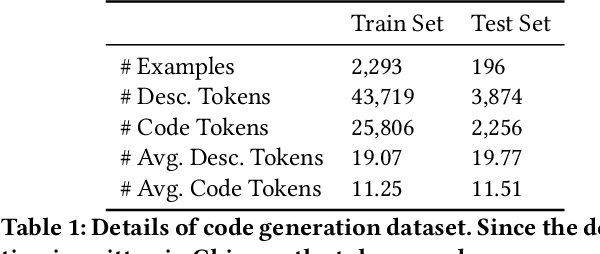
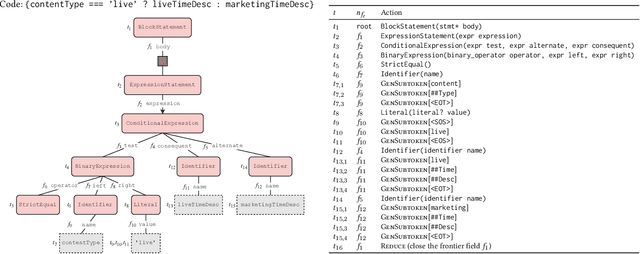
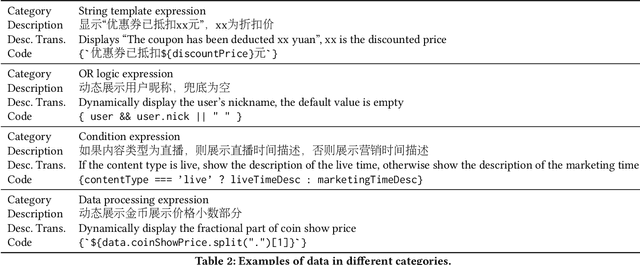
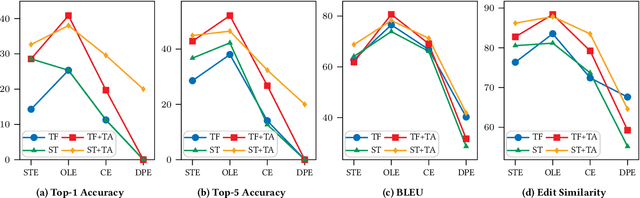
Code generation aims to generate a code snippet automatically from natural language descriptions. Generally, the mainstream code generation methods rely on a large amount of paired training data, including both the natural language description and the code. However, in some domain-specific scenarios, building such a large paired corpus for code generation is difficult because there is no directly available pairing data, and a lot of effort is required to manually write the code descriptions to construct a high-quality training dataset. Due to the limited training data, the generation model cannot be well trained and is likely to be overfitting, making the model's performance unsatisfactory for real-world use. To this end, in this paper, we propose a task augmentation method that incorporates domain knowledge into code generation models through auxiliary tasks and a Subtoken-TranX model by extending the original TranX model to support subtoken-level code generation. To verify our proposed approach, we collect a real-world code generation dataset and conduct experiments on it. Our experimental results demonstrate that the subtoken-level TranX model outperforms the original TranX model and the Transformer model on our dataset, and the exact match accuracy of Subtoken-TranX improves significantly by 12.75% with the help of our task augmentation method. The model performance on several code categories has satisfied the requirements for application in industrial systems. Our proposed approach has been adopted by Alibaba's BizCook platform. To the best of our knowledge, this is the first domain code generation system adopted in industrial development environments.
FAST-LIVO: Fast and Tightly-coupled Sparse-Direct LiDAR-Inertial-Visual Odometry
Mar 02, 2022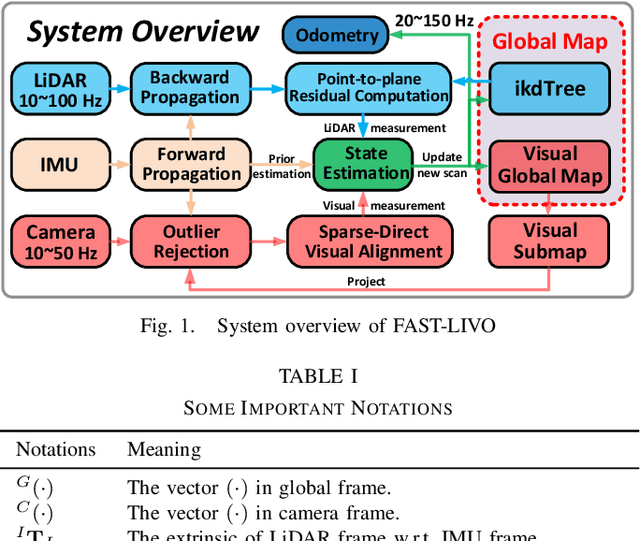
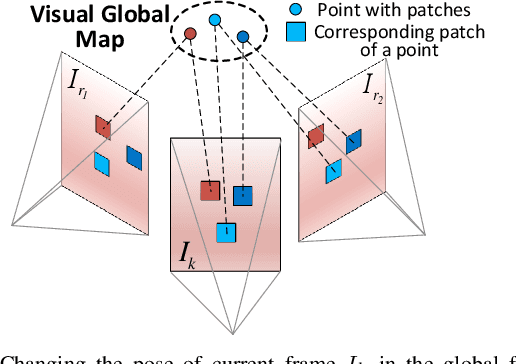
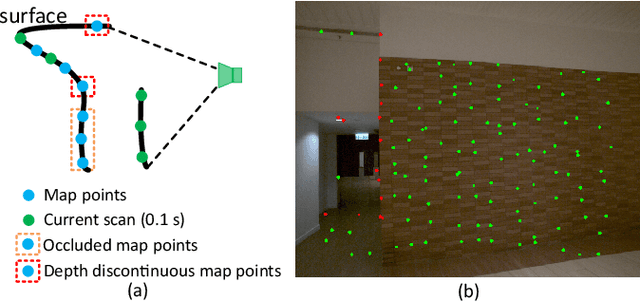
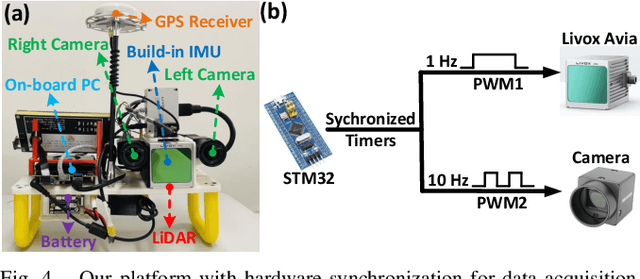
To achieve accurate and robust pose estimation in Simultaneous Localization and Mapping (SLAM) task, multi-sensor fusion is proven to be an effective solution and thus provides great potential in robotic applications. This paper proposes FAST-LIVO, a fast LiDAR-Inertial-Visual Odometry system, which builds on two tightly-coupled and direct odometry subsystems: a VIO subsystem and a LIO subsystem. The LIO subsystem registers raw points (instead of feature points on e.g., edges or planes) of a new scan to an incrementally-built point cloud map. The map points are additionally attached with image patches, which are then used in the VIO subsystem to align a new image by minimizing the direct photometric errors without extracting any visual features (e.g., ORB or FAST corner features). To further improve the VIO robustness and accuracy, a novel outlier rejection method is proposed to reject unstable map points that lie on edges or are occluded in the image view. Experiments on both open data sequences and our customized device data are conducted. The results show our proposed system outperforms other counterparts and can handle challenging environments at reduced computation cost. The system supports both multi-line spinning LiDARs and emerging solid-state LiDARs with completely different scanning patterns, and can run in real-time on both Intel and ARM processors. We open source our code and dataset of this work on Github to benefit the robotics community.