 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Tail-Sitter Flights in Unknown Environments
Nov 26, 2024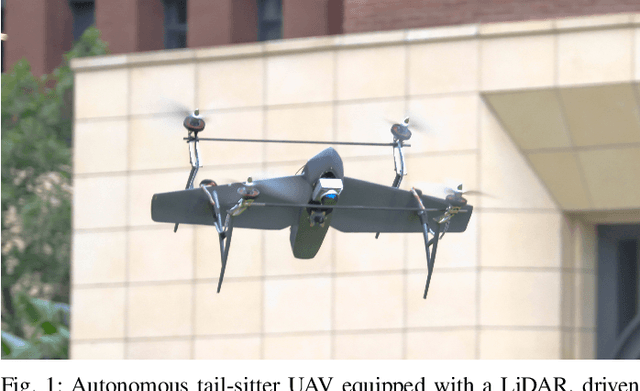

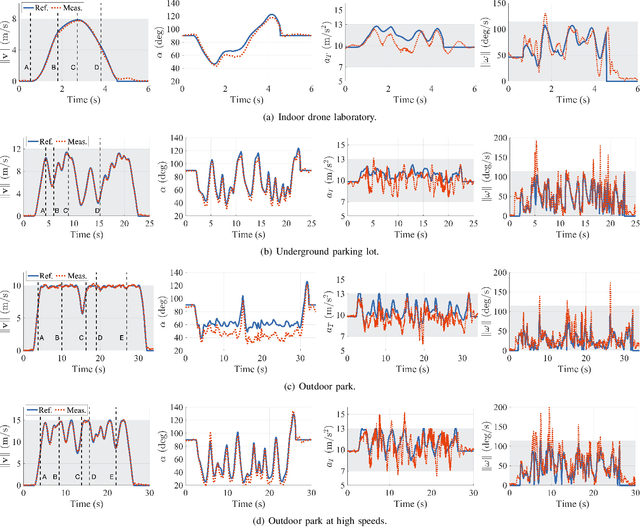

Trajectory generation for fully autonomous flights of tail-sitter unmanned aerial vehicles (UAVs) presents substantial challenges due to their highly nonlinear aerodynamics. In this paper, we introduce, to the best of our knowledge, the world's first fully autonomous tail-sitter UAV capable of high-speed navigation in unknown, cluttered environments. The UAV autonomy is enabled by cutting-edge technologies including LiDAR-based sensing, differential-flatness-based trajectory planning and control with purely onboard computation. In particular, we propose an optimization-based tail-sitter trajectory planning framework that generates high-speed, collision-free, and dynamically-feasible trajectories. To efficiently and reliably solve this nonlinear, constrained \textcolor{black}{problem}, we develop an efficient feasibility-assured solver, EFOPT, tailored for the online planning of tail-sitter UAVs. We conduct extensive simulation studies to benchmark EFOPT's superiority in planning tasks against conventional NLP solvers. We also demonstrate exhaustive experiments of aggressive autonomous flights with speeds up to 15m/s in various real-world environments, including indoor laboratories, underground parking lots, and outdoor parks. A video demonstration is available at https://youtu.be/OvqhlB2h3k8, and the EFOPT solver is open-sourced at https://github.com/hku-mars/EFOPT.
Swarm-LIO2: Decentralized, Efficient LiDAR-inertial Odometry for UAV Swarms
Sep 26, 2024



Aerial swarm systems possess immense potential in various aspects, such as cooperative exploration, target tracking, search and rescue. Efficient, accurate self and mutual state estimation are the critical preconditions for completing these swarm tasks, which remain challenging research topics. This paper proposes Swarm-LIO2: a fully decentralized, plug-and-play, computationally efficient, and bandwidth-efficient LiDAR-inertial odometry for aerial swarm systems. Swarm-LIO2 uses a decentralized, plug-and-play network as the communication infrastructure. Only bandwidth-efficient and low-dimensional information is exchanged, including identity, ego-state, mutual observation measurements, and global extrinsic transformations. To support the plug-and-play of new teammate participants, Swarm-LIO2 detects potential teammate UAVs and initializes the temporal offset and global extrinsic transformation all automatically. To enhance the initialization efficiency, novel reflectivity-based UAV detection, trajectory matching, and factor graph optimization methods are proposed. For state estimation, Swarm-LIO2 fuses LiDAR, IMU, and mutual observation measurements within an efficient ESIKF framework, with careful compensation of temporal delay and modeling of measurements to enhance the accuracy and consistency.
Trajectory Generation and Tracking Control for Aggressive Tail-Sitter Flights
Dec 22, 2022
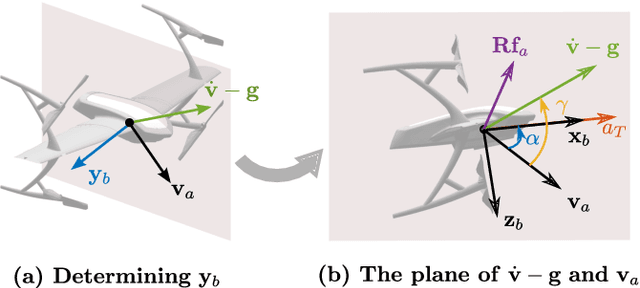
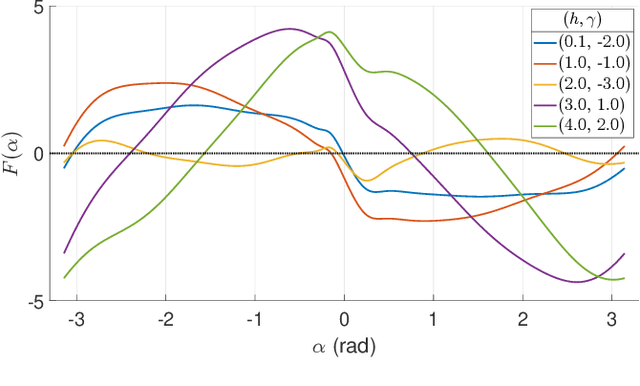
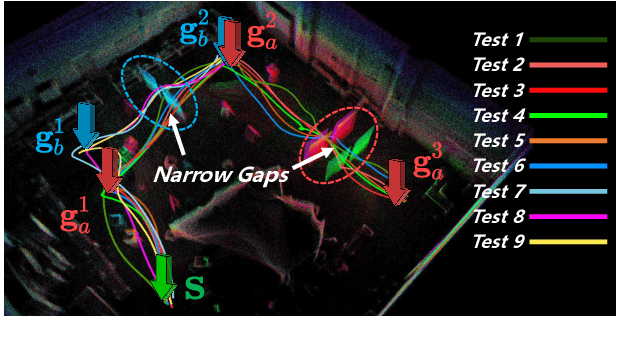
We address the theoretical and practical problems related to the trajectory generation and tracking control of tail-sitter UAVs. Theoretically, we focus on the differential flatness property with full exploitation of actual UAV aerodynamic models, which lays a foundation for generating dynamically feasible trajectory and achieving high-performance tracking control. We have found that a tail-sitter is differentially flat with accurate aerodynamic models within the entire flight envelope, by specifying coordinate flight condition and choosing the vehicle position as the flat output. This fundamental property allows us to fully exploit the high-fidelity aerodynamic models in the trajectory planning and tracking control to achieve accurate tail-sitter flights. Particularly, an optimization-based trajectory planner for tail-sitters is proposed to design high-quality, smooth trajectories with consideration of kinodynamic constraints, singularity-free constraints and actuator saturation. The planned trajectory of flat output is transformed to state trajectory in real-time with consideration of wind in environments. To track the state trajectory, a global, singularity-free, and minimally-parameterized on-manifold MPC is developed, which fully leverages the accurate aerodynamic model to achieve high-accuracy trajectory tracking within the whole flight envelope. The effectiveness of the proposed framework is demonstrated through extensive real-world experiments in both indoor and outdoor field tests, including agile SE(3) flight through consecutive narrow windows requiring specific attitude and with speed up to 10m/s, typical tail-sitter maneuvers (transition, level flight and loiter) with speed up to 20m/s, and extremely aggressive aerobatic maneuvers (Wingover, Loop, Vertical Eight and Cuban Eight) with acceleration up to 2.5g.
Online Whole-body Motion Planning for Quadrotor using Multi-resolution Search
Sep 14, 2022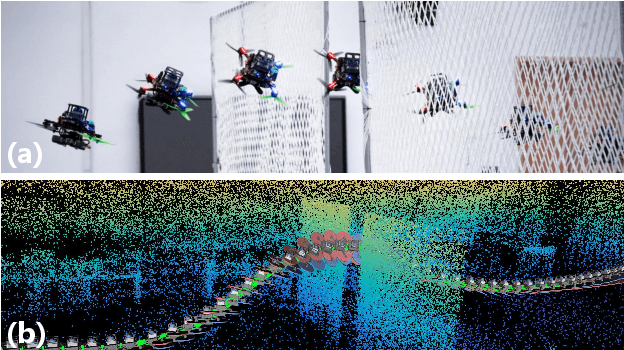
In this paper, we address the problem of online quadrotor whole-body motion planning (SE(3) planning) in unknown and unstructured environments. We propose a novel multi-resolution search method, which discovers narrow areas requiring full pose planning and normal areas requiring only position planning. As a consequence, a quadrotor planning problem is decomposed into several SE(3) (if necessary) and R^3 sub-problems. To fly through the discovered narrow areas, a carefully designed corridor generation strategy for narrow areas is proposed, which significantly increases the planning success rate. The overall problem decomposition and hierarchical planning framework substantially accelerate the planning process, making it possible to work online with fully onboard sensing and computation in unknown environments. Extensive simulation benchmark comparisons show that the proposed method has an order of magnitude faster than the state-of-the-art methods in computation time while maintaining high planning success rate. The proposed method is finally integrated into a LiDAR-based autonomous quadrotor, and various real-world experiments in unknown and unstructured environments are conducted to demonstrate the outstanding performance of the proposed method.
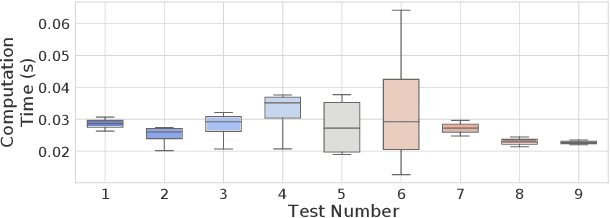
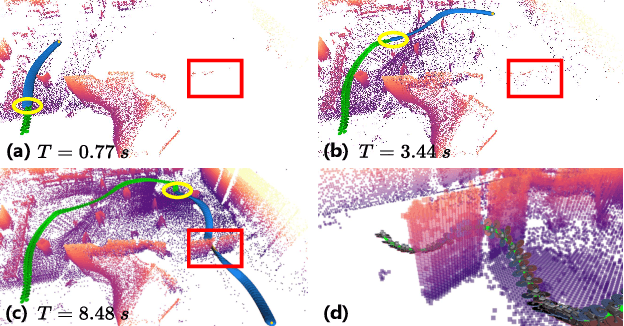
Model Predictive Control for Trajectory Tracking on Differentiable Manifolds
Jun 29, 2021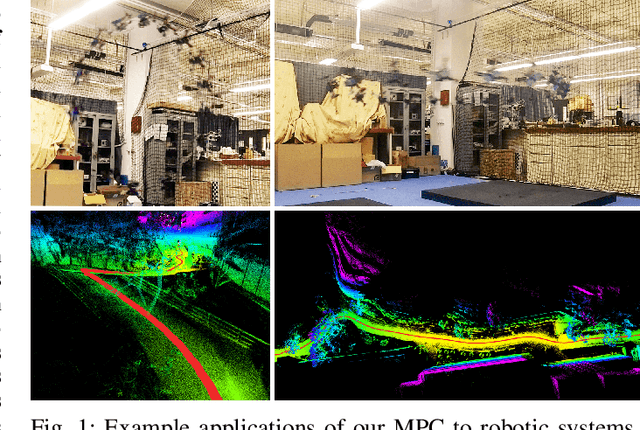

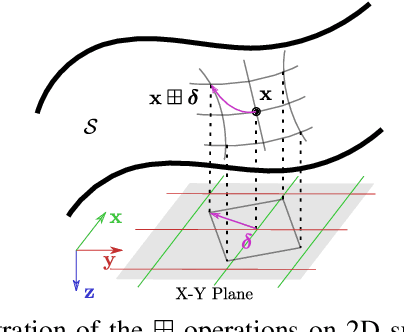
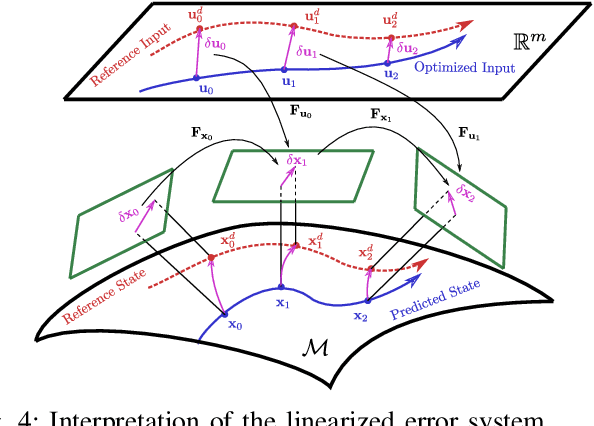
We consider the problem of bridging the gap between geometric tracking control theory and implementation of model predictive control (MPC) for robotic systems operating on manifolds. We propose a generic on-manifold MPC formulation based on a canonical representation of the system evolving on manifolds. Then, we present a method that solves the on-manifold MPC formulation by linearizing the system along the trajectory under tracking. There are two main advantages of the proposed scheme. The first is that the linearized system leads to an equivalent error system represented by a set of minimal parameters without any singularity. Secondly, the process of system modeling, error-system derivation, linearization and control has the manifold constraints completely decoupled from the system descriptions, enabling the development of a symbolic MPC framework that naturally encapsulates the manifold constraints. In this framework, users need only to supply system-specific descriptions without dealing with the manifold constraints. We implement this framework and test it on a quadrotor unmanned aerial vehicle (UAV) operating on $SO(3) \times \mathbb{R}^n$ and an unmanned ground vehicle (UGV) moving on a curved surface. Real-world experiments show that the proposed framework and implementation achieve high tracking performance and computational efficiency even in highly aggressive aerobatic quadrotor maneuvers.