 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeveloping a Robotic Surgery Training System for Wide Accessibility and Research
May 26, 2025Robotic surgery represents a major breakthrough in medical interventions, which has revolutionized surgical procedures. However, the high cost and limited accessibility of robotic surgery systems pose significant challenges for training purposes. This study addresses these issues by developing a cost-effective robotic laparoscopy training system that closely replicates advanced robotic surgery setups to ensure broad access for both on-site and remote users. Key innovations include the design of a low-cost robotic end-effector that effectively mimics high-end laparoscopic instruments. Additionally, a digital twin platform was established, facilitating detailed simulation, testing, and real-time monitoring, which enhances both system development and deployment. Furthermore, teleoperation control was optimized, leading to improved trajectory tracking while maintaining remote center of motion (RCM) constraint, with a RMSE of 5 {\mu}m and reduced system latency to 0.01 seconds. As a result, the system provides smooth, continuous motion and incorporates essential safety features, making it a highly effective tool for laparoscopic training.
Controllable Latent Diffusion for Traffic Simulation
Mar 14, 2025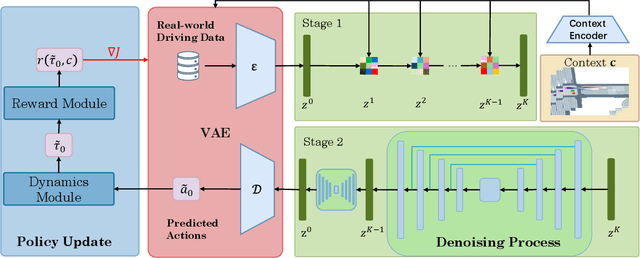
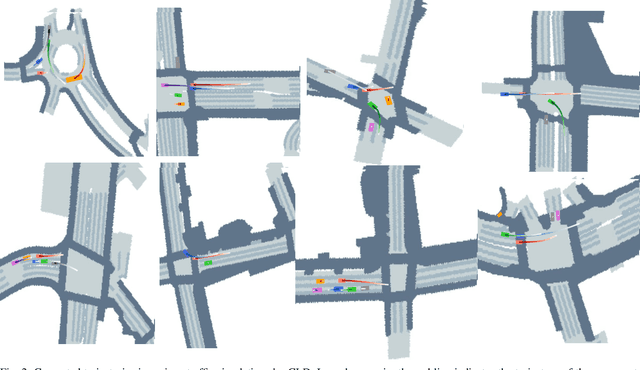
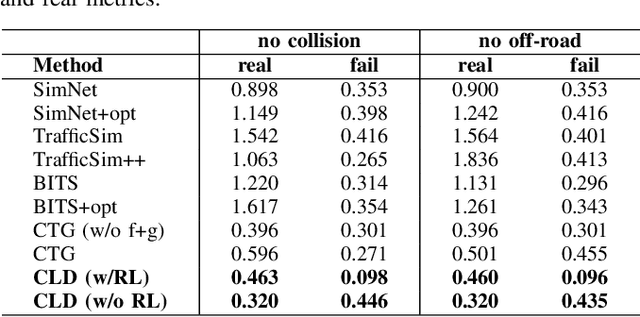
The validation of autonomous driving systems benefits greatly from the ability to generate scenarios that are both realistic and precisely controllable. Conventional approaches, such as real-world test drives, are not only expensive but also lack the flexibility to capture targeted edge cases for thorough evaluation. To address these challenges, we propose a controllable latent diffusion that guides the training of diffusion models via reinforcement learning to automatically generate a diverse and controllable set of driving scenarios for virtual testing. Our approach removes the reliance on large-scale real-world data by generating complex scenarios whose properties can be finely tuned to challenge and assess autonomous vehicle systems. Experimental results show that our approach has the lowest collision rate of $0.098$ and lowest off-road rate of $0.096$, demonstrating superiority over existing baselines. The proposed approach significantly improves the realism, stability and controllability of the generated scenarios, enabling more nuanced safety evaluation of autonomous vehicles.
An Automated Machine Learning Framework for Surgical Suturing Action Detection under Class Imbalance
Feb 10, 2025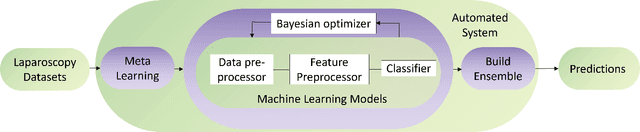
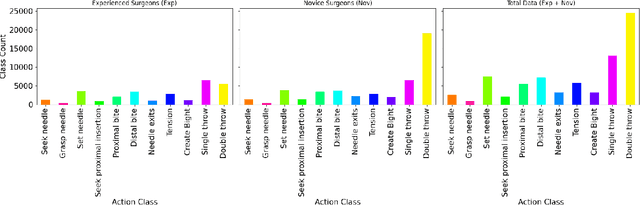
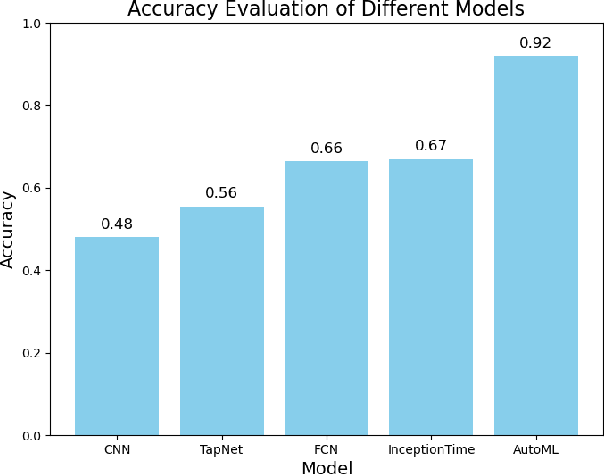
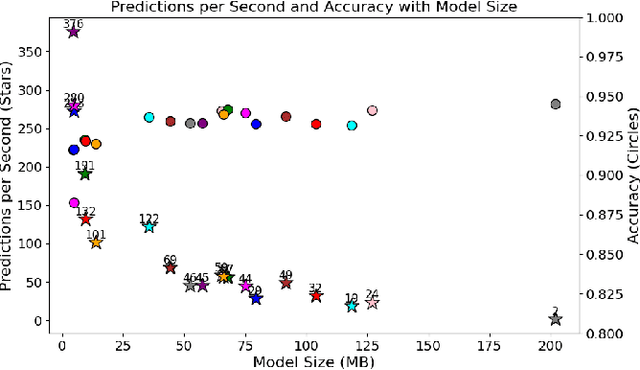
In laparoscopy surgical training and evaluation, real-time detection of surgical actions with interpretable outputs is crucial for automated and real-time instructional feedback and skill development. Such capability would enable development of machine guided training systems. This paper presents a rapid deployment approach utilizing automated machine learning methods, based on surgical action data collected from both experienced and trainee surgeons. The proposed approach effectively tackles the challenge of highly imbalanced class distributions, ensuring robust predictions across varying skill levels of surgeons. Additionally, our method partially incorporates model transparency, addressing the reliability requirements in medical applications. Compared to deep learning approaches, traditional machine learning models not only facilitate efficient rapid deployment but also offer significant advantages in interpretability. Through experiments, this study demonstrates the potential of this approach to provide quick, reliable and effective real-time detection in surgical training environments
SpasticMyoElbow: Physical Human-Robot Interaction Simulation Framework for Modelling Elbow Spasticity
Dec 06, 2024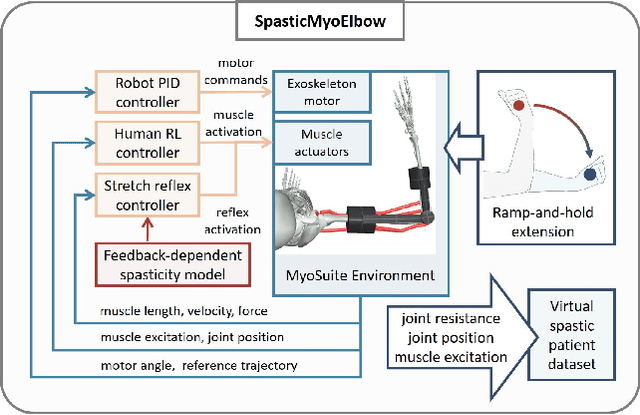
Robotic devices hold great potential for efficient and reliable assessment of neuromotor abnormalities in post-stroke patients. However, spasticity caused by stroke is still assessed manually in clinical settings. The limited and variable nature of data collected from patients has long posed a major barrier to quantitatively modelling spasticity with robotic measurements and fully validating robotic assessment techniques. This paper presents a simulation framework developed to support the design and validation of elbow spasticity models and mitigate data problems. The framework consists of a simulation environment of robot-assisted spasticity assessment, two motion controllers for the robot and human models, and a stretch reflex controller. Our framework allows simulation based on synthetic data without experimental data from human subjects. Using this framework, we replicated the constant-velocity stretch experiment typically used in robot-assisted spasticity assessment and evaluated four types of spasticity models. Our results show that a spasticity reflex model incorporating feedback on both muscle fibre velocity and length more accurately captures joint resistance characteristics during passive elbow stretching in spastic patients than a force-dependent model. When integrated with an appropriate spasticity model, this simulation framework has the potential to generate extensive datasets of virtual patients for future research on spasticity assessment.
Replication of Impedance Identification Experiments on a Reinforcement-Learning-Controlled Digital Twin of Human Elbows
Feb 05, 2024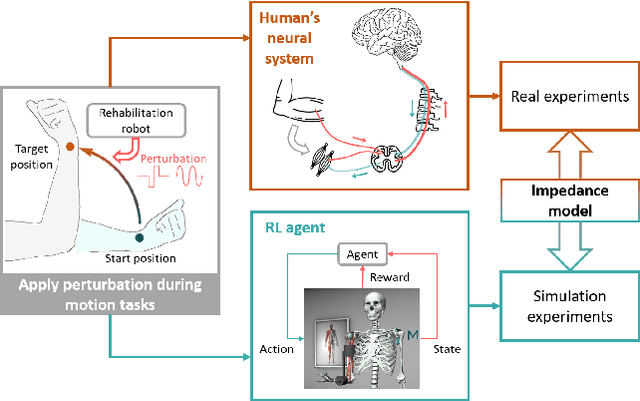
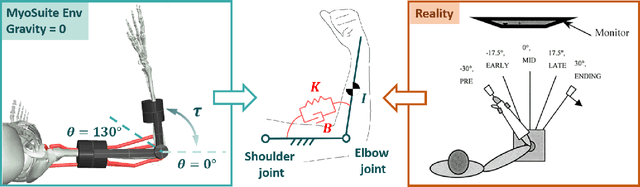
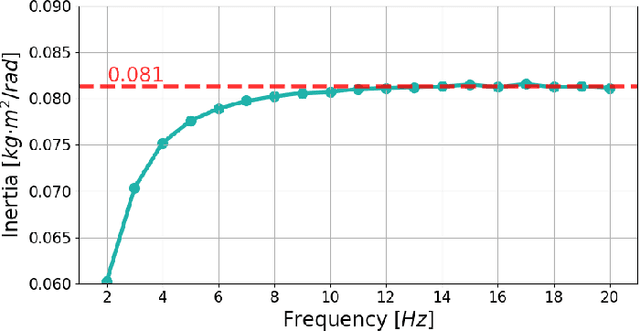
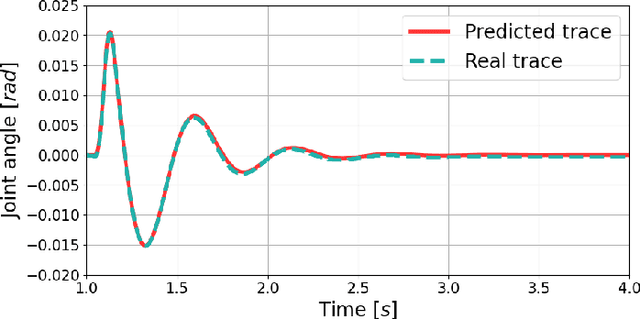
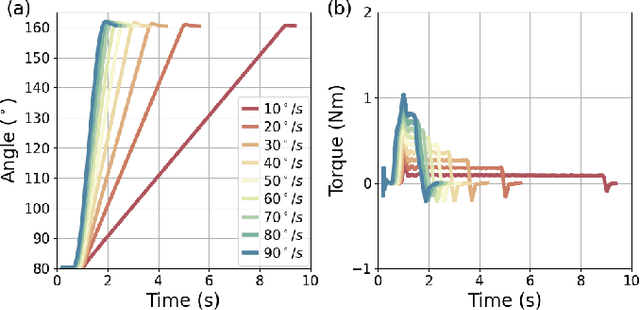
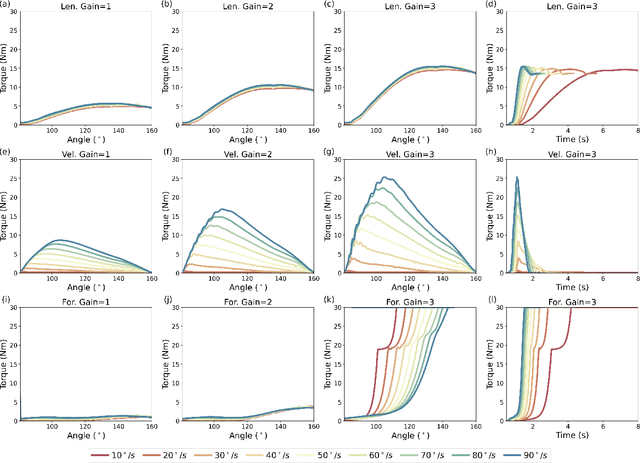
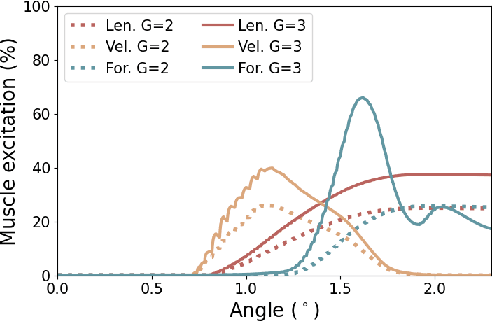
This study presents a pioneering effort to replicate human neuromechanical experiments within a virtual environment utilising a digital human model. By employing MyoSuite, a state-of-the-art human motion simulation platform enhanced by Reinforcement Learning (RL), multiple types of impedance identification experiments of human elbow were replicated on a musculoskeletal model. We compared the elbow movement controlled by an RL agent with the motion of an actual human elbow in terms of the impedance identified in torque-perturbation experiments. The findings reveal that the RL agent exhibits higher elbow impedance to stabilise the target elbow motion under perturbation than a human does, likely due to its shorter reaction time and superior sensory capabilities. This study serves as a preliminary exploration into the potential of virtual environment simulations for neuromechanical research, offering an initial yet promising alternative to conventional experimental approaches. An RL-controlled digital twin with complete musculoskeletal models of the human body is expected to be useful in designing experiments and validating rehabilitation theory before experiments on real human subjects.
Fractal Impedance for Passive Controllers
Nov 12, 2019
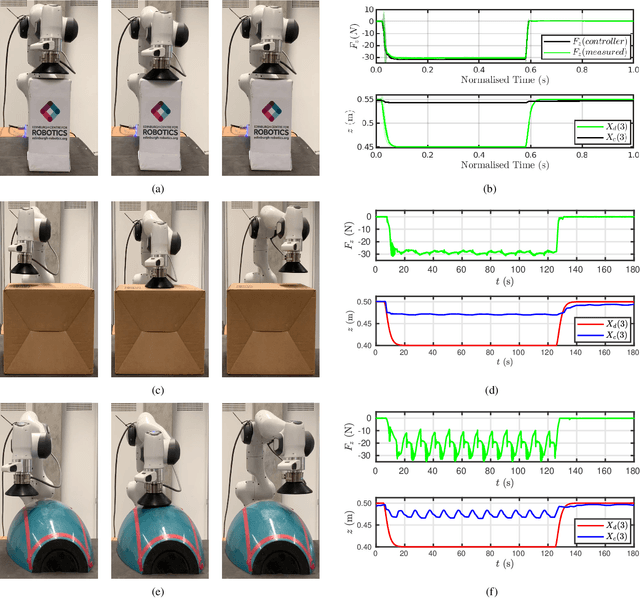
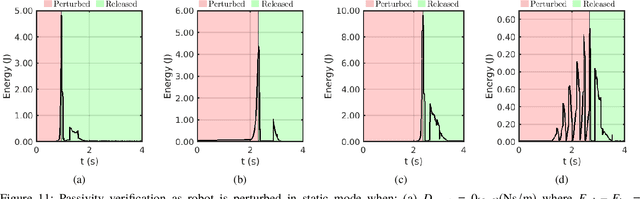
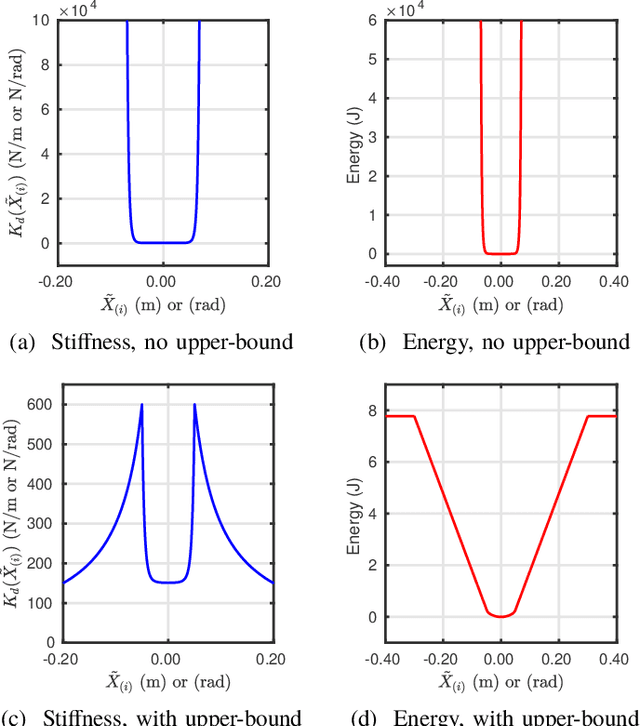
During the last decade, there has been increasing interest in new control frameworks to move robots from their industrial cages to unstructured environments where they may coexist with humans. Despite significant improvement in some specific applications (e.g., medical robotics), there is still the need of a general control framework to improve the robots' dynamics interaction performance without limiting system safety. The passive control framework has shown promising results in this direction; however, it relies on virtual energy tanks that can guarantee passivity as long as they do not run out of energy. In this paper, a fractal attractor is proposed to implement a variable impedance controller that is able to retain passivity without relying on the energy tank framework. The results prove that the proposed method can accurately track trajectories and apply forces at the end-effector. Furthermore, it can automatically deal with the extra energy introduced by changes in interaction conditions, null-space controller and environment. Therefore, These properties make the controller ideal for applications where the dynamic interaction at the end-effector is difficult to be characterized in advance, such as human-robot interaction and unknown dynamics.
Mechanical design of a distal scanner for confocal microlaparoscope: A conic solution
Apr 13, 2018



This paper presents the mechanical design of a distal scanner to perform a spiral scan for mosaic-imaging with a confocal microlaparoscope. First, it is demonstrated with ex vivo experiments that a spiral scan performs better than a raster scan on soft tissue. Then a mechanical design is developed in order to perform the spiral scan. The design in this paper is based on a conic structure with a particular curved surface. The mechanism is simple to implement and to drive; therefore, it is a low-cost solution. A 5:1 scale prototype is implemented by rapid prototyping and the requirements are validated by experiments. The experiments include manual and motor drive of the system. The manual drive demonstrates the resulting spiral motion by drawing the tip trajectory with an attached pencil. The motor drive demonstrates the speed control of the system with an analysis of video thread capturing the trajectory of a laser beam emitted from the tip.