 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpasticMyoElbow: Physical Human-Robot Interaction Simulation Framework for Modelling Elbow Spasticity
Dec 06, 2024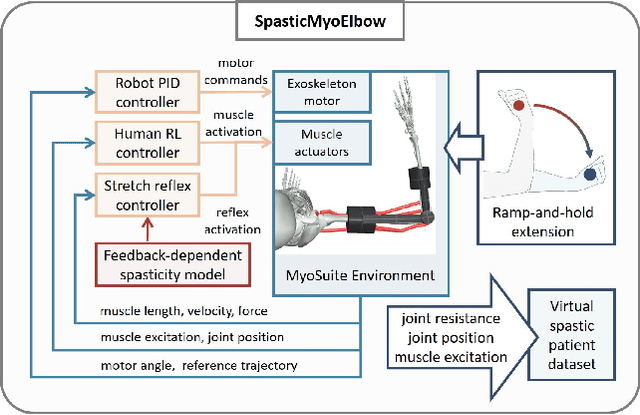
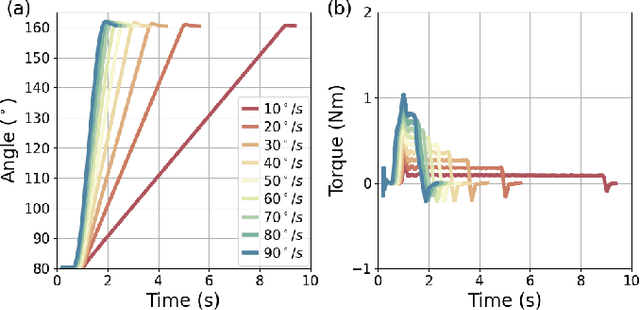
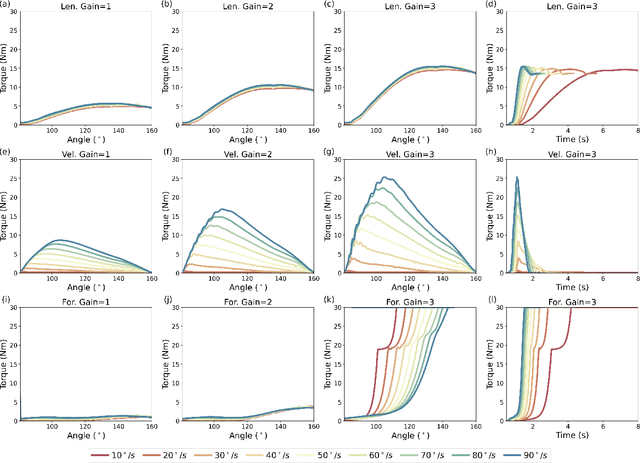
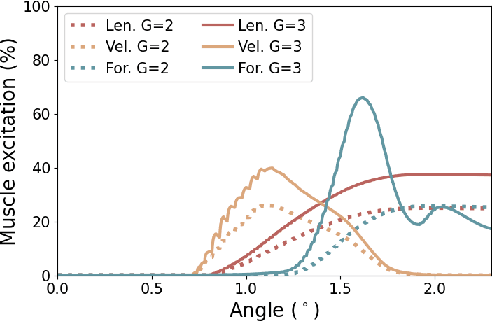
Robotic devices hold great potential for efficient and reliable assessment of neuromotor abnormalities in post-stroke patients. However, spasticity caused by stroke is still assessed manually in clinical settings. The limited and variable nature of data collected from patients has long posed a major barrier to quantitatively modelling spasticity with robotic measurements and fully validating robotic assessment techniques. This paper presents a simulation framework developed to support the design and validation of elbow spasticity models and mitigate data problems. The framework consists of a simulation environment of robot-assisted spasticity assessment, two motion controllers for the robot and human models, and a stretch reflex controller. Our framework allows simulation based on synthetic data without experimental data from human subjects. Using this framework, we replicated the constant-velocity stretch experiment typically used in robot-assisted spasticity assessment and evaluated four types of spasticity models. Our results show that a spasticity reflex model incorporating feedback on both muscle fibre velocity and length more accurately captures joint resistance characteristics during passive elbow stretching in spastic patients than a force-dependent model. When integrated with an appropriate spasticity model, this simulation framework has the potential to generate extensive datasets of virtual patients for future research on spasticity assessment.
A Weak Monotonicity Based Muscle Fatigue Detection Algorithm for a Short-Duration Poor Posture Using sEMG Measurements
Jun 18, 2021

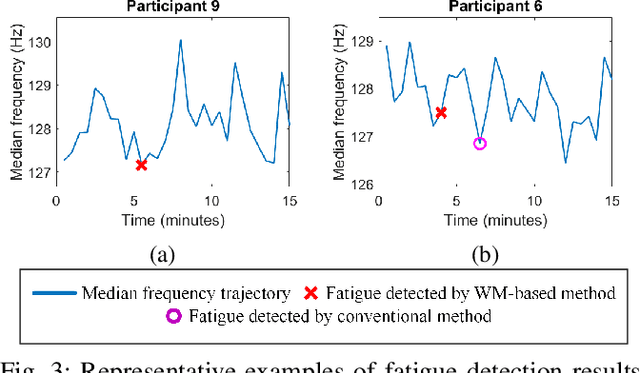
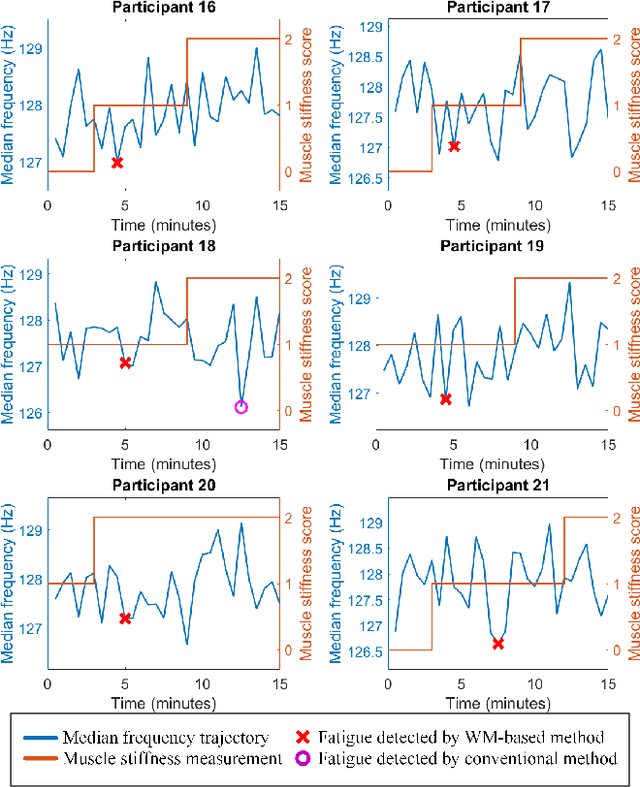
Muscle fatigue is usually defined as a decrease in the ability to produce force. The surface electromyography (sEMG) signals have been widely used to provide information about muscle activities including detecting muscle fatigue by various data-driven techniques such as machine learning and statistical approaches. However, it is well-known that sEMG signals are weak signals (low amplitude of the signals) with a low signal-to-noise ratio, data-driven techniques cannot work well when the quality of the data is poor. In particular, the existing methods are unable to detect muscle fatigue coming from static poses. This work exploits the concept of weak monotonicity, which has been observed in the process of fatigue, to robustly detect muscle fatigue in the presence of measurement noises and human variations. Such a population trend methodology has shown its potential in muscle fatigue detection as demonstrated by the experiment of a static pose.