 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpasticMyoElbow: Physical Human-Robot Interaction Simulation Framework for Modelling Elbow Spasticity
Dec 06, 2024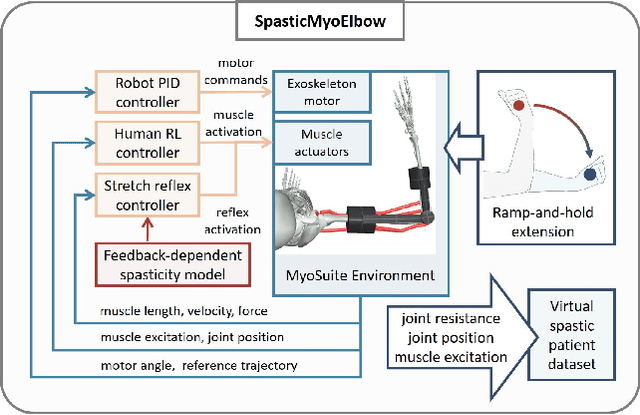
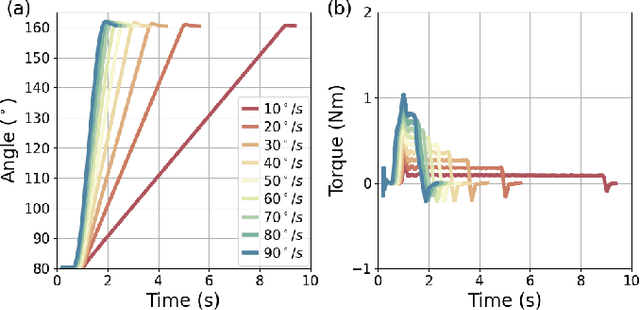
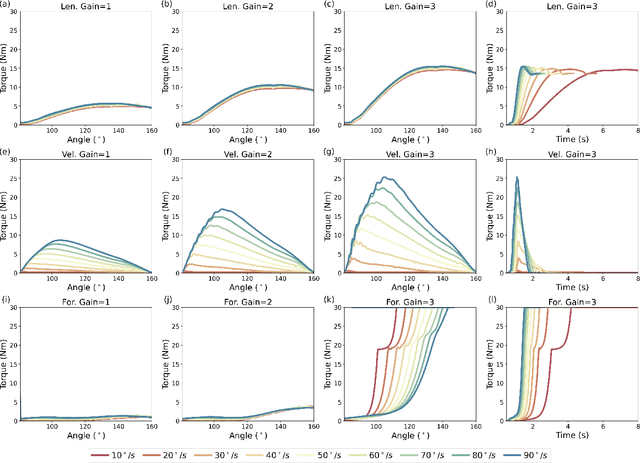
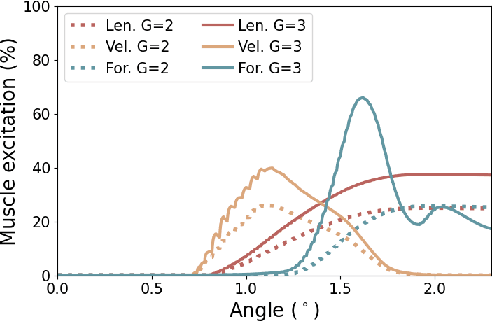
Robotic devices hold great potential for efficient and reliable assessment of neuromotor abnormalities in post-stroke patients. However, spasticity caused by stroke is still assessed manually in clinical settings. The limited and variable nature of data collected from patients has long posed a major barrier to quantitatively modelling spasticity with robotic measurements and fully validating robotic assessment techniques. This paper presents a simulation framework developed to support the design and validation of elbow spasticity models and mitigate data problems. The framework consists of a simulation environment of robot-assisted spasticity assessment, two motion controllers for the robot and human models, and a stretch reflex controller. Our framework allows simulation based on synthetic data without experimental data from human subjects. Using this framework, we replicated the constant-velocity stretch experiment typically used in robot-assisted spasticity assessment and evaluated four types of spasticity models. Our results show that a spasticity reflex model incorporating feedback on both muscle fibre velocity and length more accurately captures joint resistance characteristics during passive elbow stretching in spastic patients than a force-dependent model. When integrated with an appropriate spasticity model, this simulation framework has the potential to generate extensive datasets of virtual patients for future research on spasticity assessment.