 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControllable Latent Diffusion for Traffic Simulation
Paper and Code
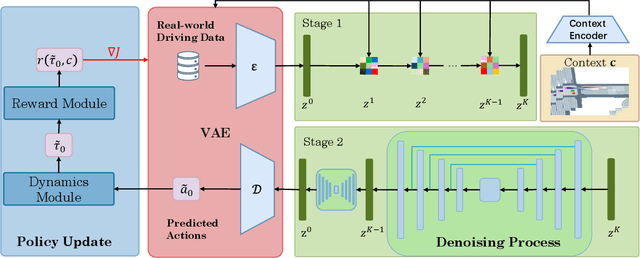
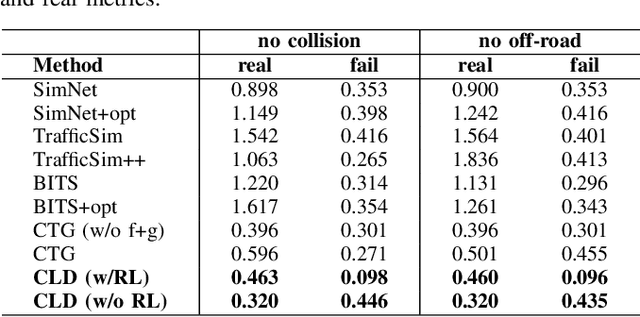
The validation of autonomous driving systems benefits greatly from the ability to generate scenarios that are both realistic and precisely controllable. Conventional approaches, such as real-world test drives, are not only expensive but also lack the flexibility to capture targeted edge cases for thorough evaluation. To address these challenges, we propose a controllable latent diffusion that guides the training of diffusion models via reinforcement learning to automatically generate a diverse and controllable set of driving scenarios for virtual testing. Our approach removes the reliance on large-scale real-world data by generating complex scenarios whose properties can be finely tuned to challenge and assess autonomous vehicle systems. Experimental results show that our approach has the lowest collision rate of $0.098$ and lowest off-road rate of $0.096$, demonstrating superiority over existing baselines. The proposed approach significantly improves the realism, stability and controllability of the generated scenarios, enabling more nuanced safety evaluation of autonomous vehicles.