 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFractal Impedance for Passive Controllers
Nov 12, 2019
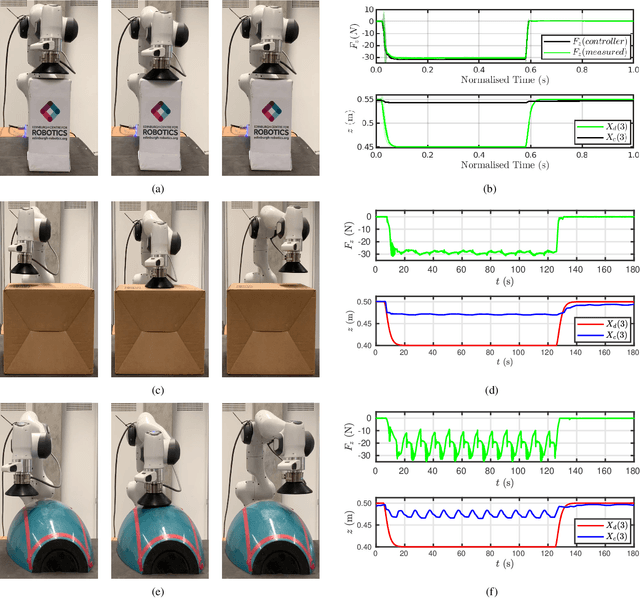
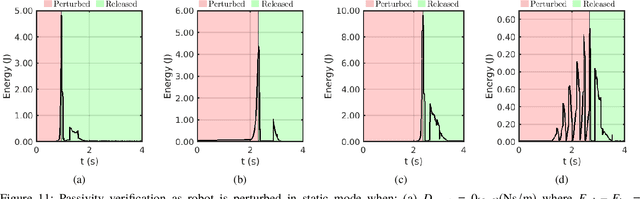
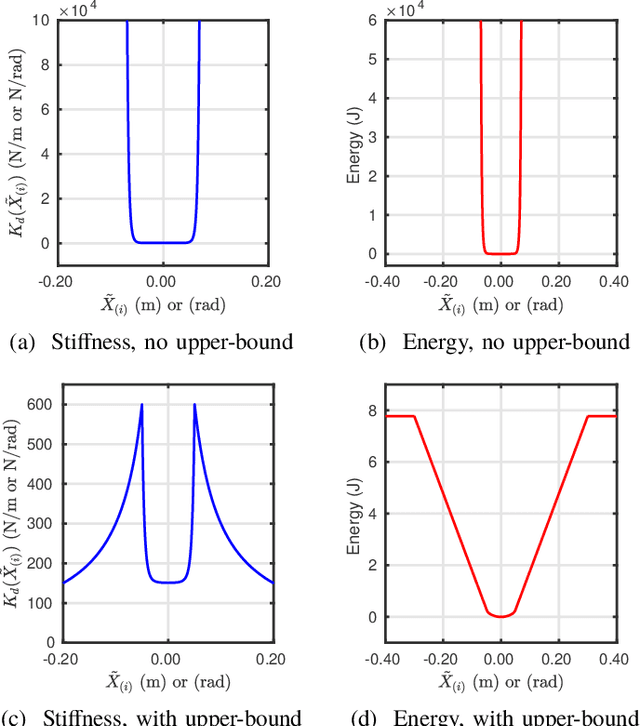
During the last decade, there has been increasing interest in new control frameworks to move robots from their industrial cages to unstructured environments where they may coexist with humans. Despite significant improvement in some specific applications (e.g., medical robotics), there is still the need of a general control framework to improve the robots' dynamics interaction performance without limiting system safety. The passive control framework has shown promising results in this direction; however, it relies on virtual energy tanks that can guarantee passivity as long as they do not run out of energy. In this paper, a fractal attractor is proposed to implement a variable impedance controller that is able to retain passivity without relying on the energy tank framework. The results prove that the proposed method can accurately track trajectories and apply forces at the end-effector. Furthermore, it can automatically deal with the extra energy introduced by changes in interaction conditions, null-space controller and environment. Therefore, These properties make the controller ideal for applications where the dynamic interaction at the end-effector is difficult to be characterized in advance, such as human-robot interaction and unknown dynamics.