 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArtHOI: Taming Foundation Models for Monocular 4D Reconstruction of Hand-Articulated-Object Interactions
Mar 26, 2026Existing hand-object interactions (HOI) methods are largely limited to rigid objects, while 4D reconstruction methods of articulated objects generally require pre-scanning the object or even multi-view videos. It remains an unexplored but significant challenge to reconstruct 4D human-articulated-object interactions from a single monocular RGB video. Fortunately, recent advancements in foundation models present a new opportunity to address this highly ill-posed problem. To this end, we introduce ArtHOI, an optimization-based framework that integrates and refines priors from multiple foundation models. Our key contribution is a suite of novel methodologies designed to resolve the inherent inaccuracies and physical unreality of these priors. In particular, we introduce an Adaptive Sampling Refinement (ASR) method to optimize object's metric scale and pose for grounding its normalized mesh in world space. Furthermore, we propose a Multimodal Large Language Model (MLLM) guided hand-object alignment method, utilizing contact reasoning information as constraints of hand-object mesh composition optimization. To facilitate a comprehensive evaluation, we also contribute two new datasets, ArtHOI-RGBD and ArtHOI-Wild. Extensive experiments validate the robustness and effectiveness of our ArtHOI across diverse objects and interactions. Project: https://arthoi-reconstruction.github.io.
Leveraging Causal Reasoning Method for Explaining Medical Image Segmentation Models
Feb 24, 2026Medical image segmentation plays a vital role in clinical decision-making, enabling precise localization of lesions and guiding interventions. Despite significant advances in segmentation accuracy, the black-box nature of most deep models has raised growing concerns about their trustworthiness in high-stakes medical scenarios. Current explanation techniques have primarily focused on classification tasks, leaving the segmentation domain relatively underexplored. We introduced an explanation model for segmentation task which employs the causal inference framework and backpropagates the average treatment effect (ATE) into a quantification metric to determine the influence of input regions, as well as network components, on target segmentation areas. Through comparison with recent segmentation explainability techniques on two representative medical imaging datasets, we demonstrated that our approach provides more faithful explanations than existing approaches. Furthermore, we carried out a systematic causal analysis of multiple foundational segmentation models using our method, which reveals significant heterogeneity in perceptual strategies across different models, and even between different inputs for the same model. Suggesting the potential of our method to provide notable insights for optimizing segmentation models. Our code can be found at https://github.com/lcmmai/PdCR.
Zenith: Scaling up Ranking Models for Billion-scale Livestreaming Recommendation
Jan 29, 2026Accurately capturing feature interactions is essential in recommender systems, and recent trends show that scaling up model capacity could be a key driver for next-level predictive performance. While prior work has explored various model architectures to capture multi-granularity feature interactions, relatively little attention has been paid to efficient feature handling and scaling model capacity without incurring excessive inference latency. In this paper, we address this by presenting Zenith, a scalable and efficient ranking architecture that learns complex feature interactions with minimal runtime overhead. Zenith is designed to handle a few high-dimensional Prime Tokens with Token Fusion and Token Boost modules, which exhibits superior scaling laws compared to other state-of-the-art ranking methods, thanks to its improved token heterogeneity. Its real-world effectiveness is demonstrated by deploying the architecture to TikTok Live, a leading online livestreaming platform that attracts billions of users globally. Our A/B test shows that Zenith achieves +1.05%/-1.10% in online CTR AUC and Logloss, and realizes +9.93% gains in Quality Watch Session / User and +8.11% in Quality Watch Duration / User.
Label-free Super-Resolution Microvessel Color Flow Imaging with Ultrasound
May 27, 2025

We present phase subtraction imaging (PSI), a new spatial-temporal beamforming method that enables micrometer level resolution imaging of microvessels in live animals without labels, which are microbubbles in ultrasound super-resolution imaging. Subtraction of relative phase differences between consecutive frames beamformed with mismatched apodizations is used in PSI to overcome the diffraction limit. We validated this method by imaging both the mouse brain and rabbit kidney using different ultrasound probes and scanning machines.
QUADFormer: Learning-based Detection of Cyber Attacks in Quadrotor UAVs
Jun 02, 2024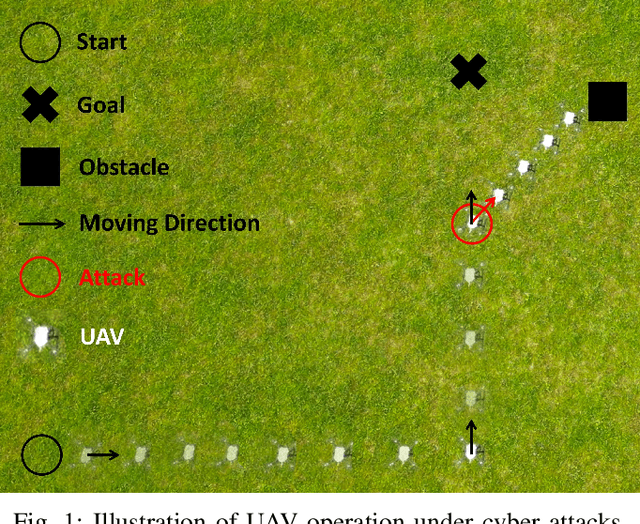
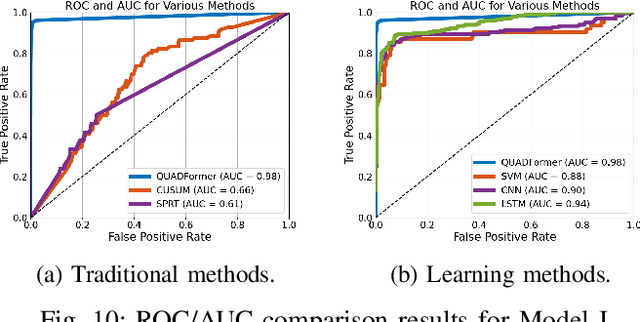
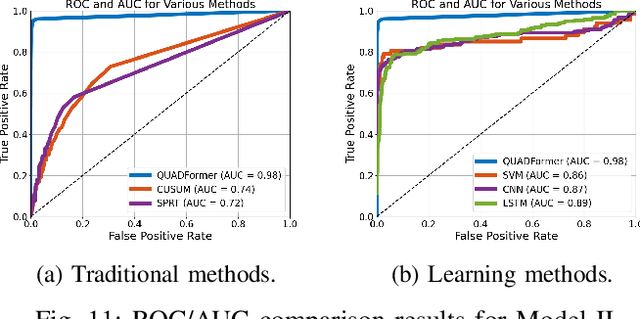
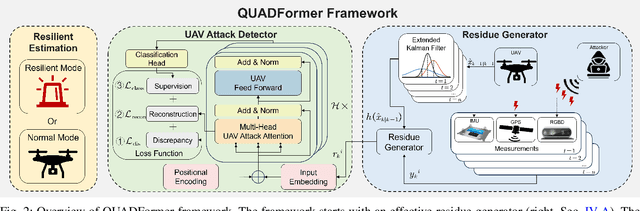
Safety-critical intelligent cyber-physical systems, such as quadrotor unmanned aerial vehicles (UAVs), are vulnerable to different types of cyber attacks, and the absence of timely and accurate attack detection can lead to severe consequences. When UAVs are engaged in large outdoor maneuvering flights, their system constitutes highly nonlinear dynamics that include non-Gaussian noises. Therefore, the commonly employed traditional statistics-based and emerging learning-based attack detection methods do not yield satisfactory results. In response to the above challenges, we propose QUADFormer, a novel Quadrotor UAV Attack Detection framework with transFormer-based architecture. This framework includes a residue generator designed to generate a residue sequence sensitive to anomalies. Subsequently, this sequence is fed into a transformer structure with disparity in correlation to specifically learn its statistical characteristics for the purpose of classification and attack detection. Finally, we design an alert module to ensure the safe execution of tasks by UAVs under attack conditions. We conduct extensive simulations and real-world experiments, and the results show that our method has achieved superior detection performance compared with many state-of-the-art methods.
Role Engine Implementation for a Continuous and Collaborative Multi-Robot System
Jul 06, 2023



In situations involving teams of diverse robots, assigning appropriate roles to each robot and evaluating their performance is crucial. These roles define the specific characteristics of a robot within a given context. The stream actions exhibited by a robot based on its assigned role are referred to as the process role. Our research addresses the depiction of process roles using a multivariate probabilistic function. The main aim of this study is to develop a role engine for collaborative multi-robot systems and optimize the behavior of the robots. The role engine is designed to assign suitable roles to each robot, generate approximately optimal process roles, update them on time, and identify instances of robot malfunction or trigger replanning when necessary. The environment considered is dynamic, involving obstacles and other agents. The role engine operates hybrid, with central initiation and decentralized action, and assigns unlabeled roles to agents. We employ the Gaussian Process (GP) inference method to optimize process roles based on local constraints and constraints related to other agents. Furthermore, we propose an innovative approach that utilizes the environment's skeleton to address initialization and feasibility evaluation challenges. We successfully demonstrated the proposed approach's feasibility, and efficiency through simulation studies and real-world experiments involving diverse mobile robots.
HigeNet: A Highly Efficient Modeling for Long Sequence Time Series Prediction in AIOps
Nov 13, 2022



Modern IT system operation demands the integration of system software and hardware metrics. As a result, it generates a massive amount of data, which can be potentially used to make data-driven operational decisions. In the basic form, the decision model needs to monitor a large set of machine data, such as CPU utilization, allocated memory, disk and network latency, and predicts the system metrics to prevent performance degradation. Nevertheless, building an effective prediction model in this scenario is rather challenging as the model has to accurately capture the long-range coupling dependency in the Multivariate Time-Series (MTS). Moreover, this model needs to have low computational complexity and can scale efficiently to the dimension of data available. In this paper, we propose a highly efficient model named HigeNet to predict the long-time sequence time series. We have deployed the HigeNet on production in the D-matrix platform. We also provide offline evaluations on several publicly available datasets as well as one online dataset to demonstrate the model's efficacy. The extensive experiments show that training time, resource usage and accuracy of the model are found to be significantly better than five state-of-the-art competing models.
Coverage Control for a Multi-robot Team with Heterogeneous Capabilities using Block Coordinate Descent Method
Apr 20, 2022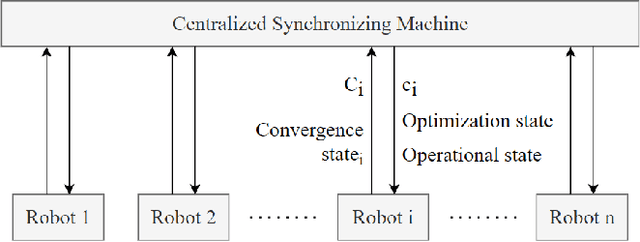


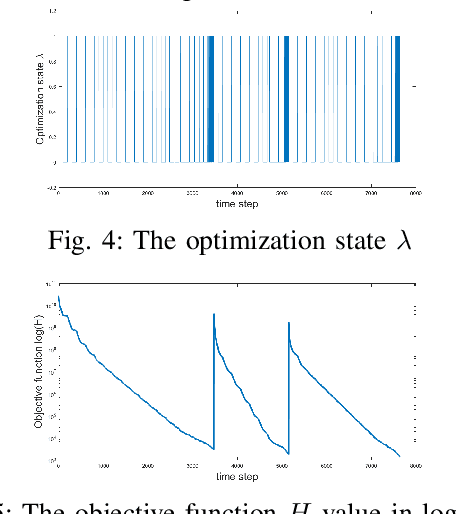
In this paper, we propose a coverage control system for a multi-robot team with heterogeneous capabilities to patrol or monitor a bounded environment. The capability could be defined as any criterion of robots like remaining power or mobile speed, depending on the purpose. The proposed control system aims to allocate different portions of the environment to the robots according to their capabilities, i.e., the robot with higher capability takes a larger portion of the environment while the robot with lower capability takes a smaller one. We use the block coordinate descent (BCD) method to optimize the location of portions and the partitioning method alternately. A centralized machine is used to synchronize the robots and the gradient of each robot can be computed in a distributed manner. Simulation results are provided to illustrate the performance of the proposed control system.