 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoverage Control for a Multi-robot Team with Heterogeneous Capabilities using Block Coordinate Descent Method
Paper and Code
Apr 20, 2022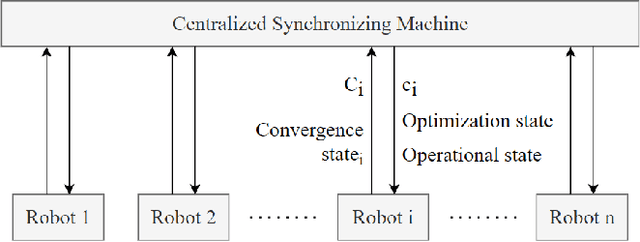


In this paper, we propose a coverage control system for a multi-robot team with heterogeneous capabilities to patrol or monitor a bounded environment. The capability could be defined as any criterion of robots like remaining power or mobile speed, depending on the purpose. The proposed control system aims to allocate different portions of the environment to the robots according to their capabilities, i.e., the robot with higher capability takes a larger portion of the environment while the robot with lower capability takes a smaller one. We use the block coordinate descent (BCD) method to optimize the location of portions and the partitioning method alternately. A centralized machine is used to synchronize the robots and the gradient of each robot can be computed in a distributed manner. Simulation results are provided to illustrate the performance of the proposed control system.