 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoDA: Exploring Chain-of-Distribution Attacks and Post-Hoc Token-Space Repair for Medical Vision-Language Models
Mar 19, 2026Medical vision--language models (MVLMs) are increasingly used as perceptual backbones in radiology pipelines and as the visual front end of multimodal assistants, yet their reliability under real clinical workflows remains underexplored. Prior robustness evaluations often assume clean, curated inputs or study isolated corruptions, overlooking routine acquisition, reconstruction, display, and delivery operations that preserve clinical readability while shifting image statistics. To address this gap, we propose CoDA, a chain-of-distribution framework that constructs clinically plausible pipeline shifts by composing acquisition-like shading, reconstruction and display remapping, and delivery and export degradations. Under masked structural-similarity constraints, CoDA jointly optimizes stage compositions and parameters to induce failures while preserving visual plausibility. Across brain MRI, chest X-ray, and abdominal CT, CoDA substantially degrades the zero-shot performance of CLIP-style MVLMs, with chained compositions consistently more damaging than any single stage. We also evaluate multimodal large language models (MLLMs) as technical-authenticity auditors of imaging realism and quality rather than pathology. Proprietary multimodal models show degraded auditing reliability and persistent high-confidence errors on CoDA-shifted samples, while the medical-specific MLLMs we test exhibit clear deficiencies in medical image quality auditing. Finally, we introduce a post-hoc repair strategy based on teacher-guided token-space adaptation with patch-level alignment, which improves accuracy on archived CoDA outputs. Overall, our findings characterize a clinically grounded threat surface for MVLM deployment and show that lightweight alignment improves robustness in deployment.
DIABLO: A 6-DoF Wheeled Bipedal Robot Composed Entirely of Direct-Drive Joints
Aug 01, 2024Wheeled bipedal robots offer the advantages of both wheeled and legged robots, combining the ability to traverse a wide range of terrains and environments with high efficiency. However, the conventional approach in existing wheeled bipedal robots involves motor-driven joints with high-ratio gearboxes. While this approach provides specific benefits, it also presents several challenges, including increased mechanical complexity, efficiency losses, noise, vibrations, and higher maintenance and lubrication requirements. Addressing the aforementioned concerns, we developed a direct-drive wheeled bipedal robot called DIABLO, which eliminates the use of gearboxes entirely. Our robotic system is simplified as a second-order inverted pendulum, and we have designed an LQR-based balance controller to ensure stability. Additionally, we implemented comprehensive motion controller, including yaw, split-angle, height, and roll controllers. Through expriments in simulations and real-world prototype, we have demonstrated that our platform achieves satisfactory performance.
Automatic Detection of Rail Components via A Deep Convolutional Transformer Network
Aug 05, 2021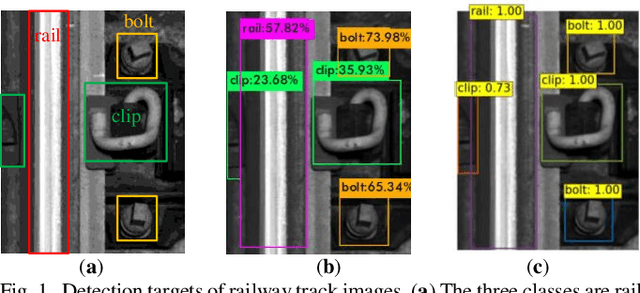
Automatic detection of rail track and its fasteners via using continuously collected railway images is important to maintenance as it can significantly improve maintenance efficiency and better ensure system safety. Dominant computer vision-based detection models typically rely on convolutional neural networks that utilize local image features and cumbersome prior settings to generate candidate boxes. In this paper, we propose a deep convolutional transformer network based method to detect multi-class rail components including the rail, clip, and bolt. We effectively synergize advantages of the convolutional structure on extracting latent features from raw images as well as advantages of transformers on selectively determining valuable latent features to achieve an efficient and accurate performance on rail component detections. Our proposed method simplifies the detection pipeline by eliminating the need of prior settings, such as anchor box, aspect ratio, default coordinates, and post-processing, such as the threshold for non-maximum suppression; as well as allows users to trade off the quality and complexity of the detector with limited training data. Results of a comprehensive computational study show that our proposed method outperforms a set of existing state-of-art approaches with large margins
Intelligent Railway Foreign Object Detection: A Semi-supervised Convolutional Autoencoder Based Method
Aug 05, 2021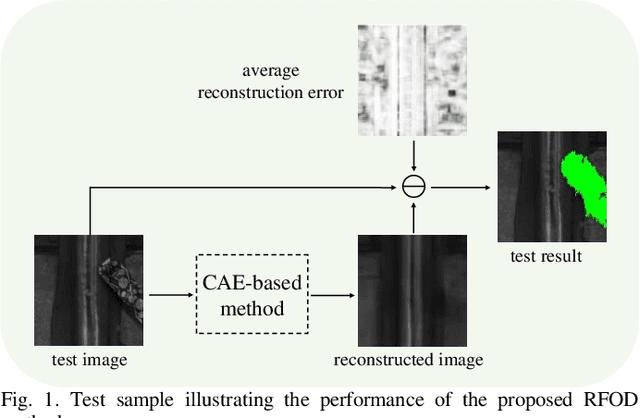
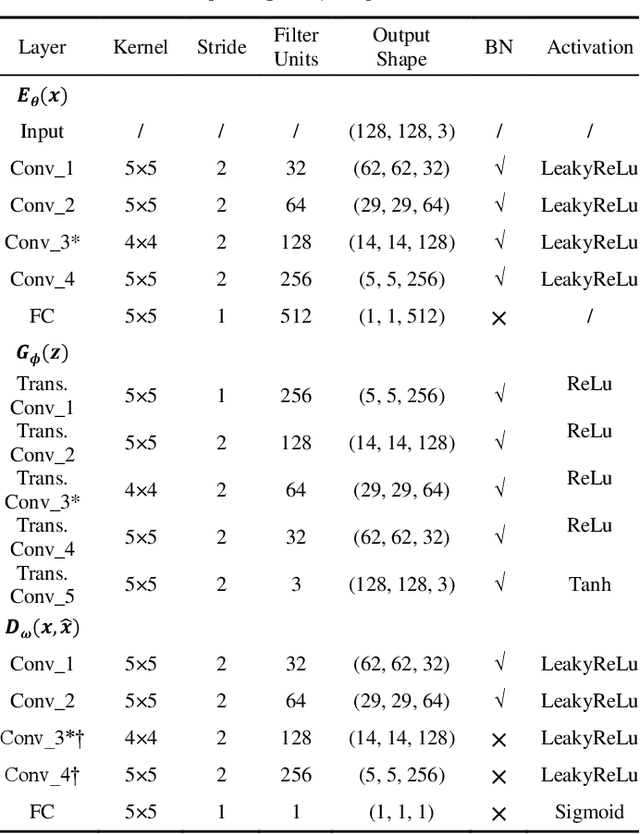
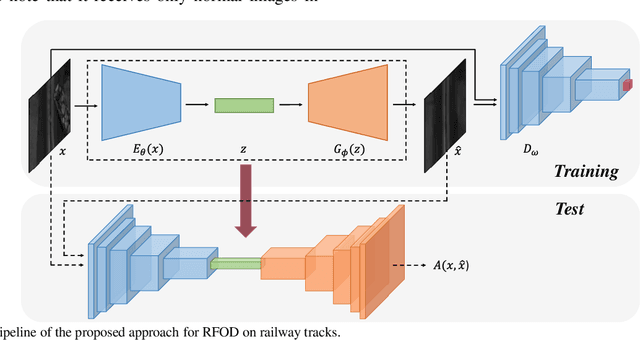
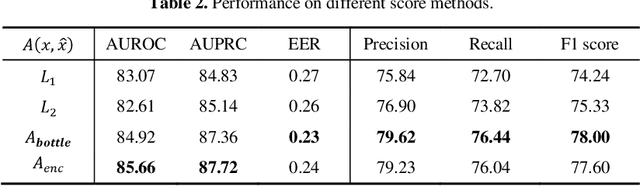
Automated inspection and detection of foreign objects on railways is important for rail transportation safety as it helps prevent potential accidents and trains derailment. Most existing vision-based approaches focus on the detection of frontal intrusion objects with prior labels, such as categories and locations of the objects. In reality, foreign objects with unknown categories can appear anytime on railway tracks. In this paper, we develop a semi-supervised convolutional autoencoder based framework that only requires railway track images without prior knowledge on the foreign objects in the training process. It consists of three different modules, a bottleneck feature generator as encoder, a photographic image generator as decoder, and a reconstruction discriminator developed via adversarial learning. In the proposed framework, the problem of detecting the presence, location, and shape of foreign objects is addressed by comparing the input and reconstructed images as well as setting thresholds based on reconstruction errors. The proposed method is evaluated through comprehensive studies under different performance criteria. The results show that the proposed method outperforms some well-known benchmarking methods. The proposed framework is useful for data analytics via the train Internet-of-Things (IoT) systems
Adversarial Attacks on Brain-Inspired Hyperdimensional Computing-Based Classifiers
Jun 10, 2020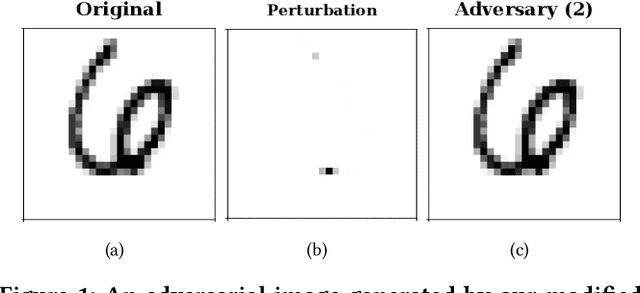
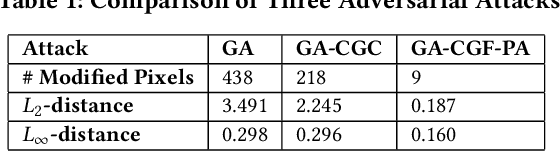
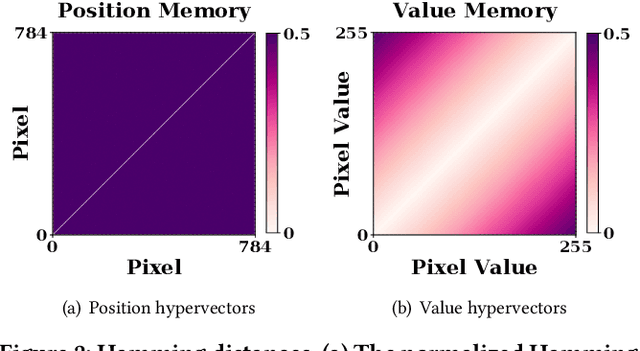
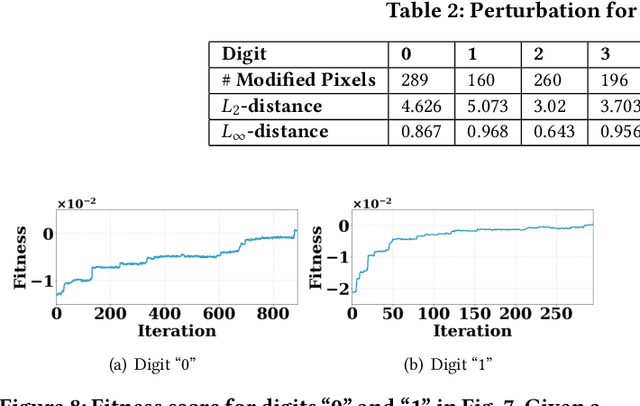
Being an emerging class of in-memory computing architecture, brain-inspired hyperdimensional computing (HDC) mimics brain cognition and leverages random hypervectors (i.e., vectors with a dimensionality of thousands or even more) to represent features and to perform classification tasks. The unique hypervector representation enables HDC classifiers to exhibit high energy efficiency, low inference latency and strong robustness against hardware-induced bit errors. Consequently, they have been increasingly recognized as an appealing alternative to or even replacement of traditional deep neural networks (DNNs) for local on device classification, especially on low-power Internet of Things devices. Nonetheless, unlike their DNN counterparts, state-of-the-art designs for HDC classifiers are mostly security-oblivious, casting doubt on their safety and immunity to adversarial inputs. In this paper, we study for the first time adversarial attacks on HDC classifiers and highlight that HDC classifiers can be vulnerable to even minimally-perturbed adversarial samples. Concretely, using handwritten digit classification as an example, we construct a HDC classifier and formulate a grey-box attack problem, where an attacker's goal is to mislead the target HDC classifier to produce erroneous prediction labels while keeping the amount of added perturbation noise as little as possible. Then, we propose a modified genetic algorithm to generate adversarial samples within a reasonably small number of queries. Our results show that adversarial images generated by our algorithm can successfully mislead the HDC classifier to produce wrong prediction labels with a high probability (i.e., 78% when the HDC classifier uses a fixed majority rule for decision). Finally, we also present two defense strategies -- adversarial training and retraining-- to strengthen the security of HDC classifiers.