 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Implementation of a High-Precision Wind-Estimation UAV with Onboard Sensors
Dec 11, 2025Accurate real-time wind vector estimation is essential for enhancing the safety, navigation accuracy, and energy efficiency of unmanned aerial vehicles (UAVs). Traditional approaches rely on external sensors or simplify vehicle dynamics, which limits their applicability during agile flight or in resource-constrained platforms. This paper proposes a real-time wind estimation method based solely on onboard sensors. The approach first estimates external aerodynamic forces using a disturbance observer (DOB), and then maps these forces to wind vectors using a thin-plate spline (TPS) model. A custom-designed wind barrel mounted on the UAV enhances aerodynamic sensitivity, further improving estimation accuracy. The system is validated through comprehensive experiments in wind tunnels, indoor and outdoor flights. Experimental results demonstrate that the proposed method achieves consistently high-accuracy wind estimation across controlled and real-world conditions, with speed RMSEs as low as \SI{0.06}{m/s} in wind tunnel tests, \SI{0.22}{m/s} during outdoor hover, and below \SI{0.38}{m/s} in indoor and outdoor dynamic flights, and direction RMSEs under \ang{7.3} across all scenarios, outperforming existing baselines. Moreover, the method provides vertical wind estimates -- unavailable in baselines -- with RMSEs below \SI{0.17}{m/s} even during fast indoor translations.
DOB-based Wind Estimation of A UAV Using Its Onboard Sensor
Sep 03, 2024Unmanned Aerial Vehicles (UAVs) play a crucial role in meteorological research, particularly in environmental wind field measurements. However, several challenges exist in current wind measurement methods using UAVs that need to be addressed. Firstly, the accuracy of measurement is low, and the measurement range is limited. Secondly, the algorithms employed lack robustness and adaptability across different UAV platforms. Thirdly, there are limited approaches available for wind estimation during dynamic flight. Finally, while horizontal plane measurements are feasible, vertical direction estimation is often missing. To tackle these challenges, we present and implement a comprehensive wind estimation algorithm. Our algorithm offers several key features, including the capability to estimate the 3-D wind vector, enabling wind estimation even during dynamic flight of the UAV. Furthermore, our algorithm exhibits adaptability across various UAV platforms. Experimental results in the wind tunnel validate the effectiveness of our algorithm, showcasing improvements such as wind speed accuracy of $0.11$ m/s and wind direction errors of less than $2.8^\circ$. Additionally, our approach extends the measurement range to $10$ m/s.
V2CE: Video to Continuous Events Simulator
Sep 16, 2023



Dynamic Vision Sensor (DVS)-based solutions have recently garnered significant interest across various computer vision tasks, offering notable benefits in terms of dynamic range, temporal resolution, and inference speed. However, as a relatively nascent vision sensor compared to Active Pixel Sensor (APS) devices such as RGB cameras, DVS suffers from a dearth of ample labeled datasets. Prior efforts to convert APS data into events often grapple with issues such as a considerable domain shift from real events, the absence of quantified validation, and layering problems within the time axis. In this paper, we present a novel method for video-to-events stream conversion from multiple perspectives, considering the specific characteristics of DVS. A series of carefully designed losses helps enhance the quality of generated event voxels significantly. We also propose a novel local dynamic-aware timestamp inference strategy to accurately recover event timestamps from event voxels in a continuous fashion and eliminate the temporal layering problem. Results from rigorous validation through quantified metrics at all stages of the pipeline establish our method unquestionably as the current state-of-the-art (SOTA).
YeLan: Event Camera-Based 3D Human Pose Estimation for Technology-Mediated Dancing in Challenging Environments with Comprehensive Motion-to-Event Simulator
Jan 17, 2023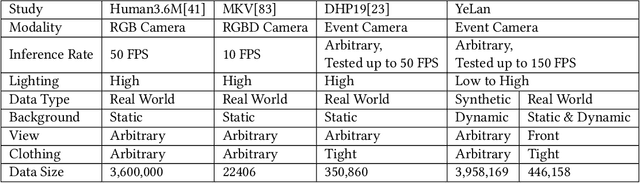



As a beloved sport worldwide, dancing is getting integrated into traditional and virtual reality-based gaming platforms nowadays. It opens up new opportunities in the technology-mediated dancing space. These platforms primarily rely on passive and continuous human pose estimation as an input capture mechanism. Existing solutions are mainly based on RGB or RGB-Depth cameras for dance games. The former suffers in low-lighting conditions due to the motion blur and low sensitivity, while the latter is too power-hungry, has a low frame rate, and has limited working distance. With ultra-low latency, energy efficiency, and wide dynamic range characteristics, the event camera is a promising solution to overcome these shortcomings. We propose YeLan, an event camera-based 3-dimensional human pose estimation(HPE) system that survives low-lighting and dynamic background contents. We collected the world's first event camera dance dataset and developed a fully customizable motion-to-event physics-aware simulator. YeLan outperforms the baseline models in these challenging conditions and demonstrated robustness against different types of clothing, background motion, viewing angle, occlusion, and lighting fluctuations.