 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Learning-Enhanced MPC for Safe Crowd Navigation with Heterogeneous Constraints
Jun 11, 2025
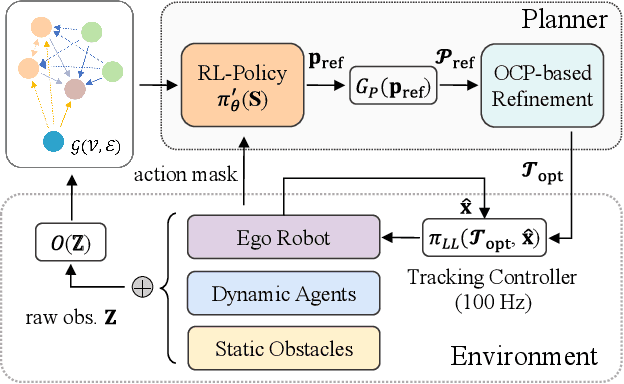


In this paper, we propose a novel hierarchical framework for robot navigation in dynamic environments with heterogeneous constraints. Our approach leverages a graph neural network trained via reinforcement learning (RL) to efficiently estimate the robot's cost-to-go, formulated as local goal recommendations. A spatio-temporal path-searching module, which accounts for kinematic constraints, is then employed to generate a reference trajectory to facilitate solving the non-convex optimization problem used for explicit constraint enforcement. More importantly, we introduce an incremental action-masking mechanism and a privileged learning strategy, enabling end-to-end training of the proposed planner. Both simulation and real-world experiments demonstrate that the proposed method effectively addresses local planning in complex dynamic environments, achieving state-of-the-art (SOTA) performance. Compared with existing learning-optimization hybrid methods, our approach eliminates the dependency on high-fidelity simulation environments, offering significant advantages in computational efficiency and training scalability. The code will be released as open-source upon acceptance of the paper.
Predictor-Based Time Delay Control of A Hex-Jet Unmanned Aerial Vehicle
Mar 12, 2025Turbojet-powered VTOL UAVs have garnered increased attention in heavy-load transport and emergency services, due to their superior power density and thrust-to-weight ratio compared to existing electronic propulsion systems. The main challenge with jet-powered UAVs lies in the complexity of thrust vectoring mechanical systems, which aim to mitigate the slow dynamics of the turbojet. In this letter, we introduce a novel turbojet-powered UAV platform named Hex-Jet. Our concept integrates thrust vectoring and differential thrust for comprehensive attitude control. This approach notably simplifies the thrust vectoring mechanism. We utilize a predictor-based time delay control method based on the frequency domain model in our Hex-Jet controller design to mitigate the delay in roll attitude control caused by turbojet dynamics. Our comparative studies provide valuable insights for the UAV community, and flight tests on the scaled prototype demonstrate the successful implementation and verification of the proposed predictor-based time delay control technique.
PMM-Net: Single-stage Multi-agent Trajectory Prediction with Patching-based Embedding and Explicit Modal Modulation
Oct 25, 2024



Analyzing and forecasting trajectories of agents like pedestrians plays a pivotal role for embodied intelligent applications. The inherent indeterminacy of human behavior and complex social interaction among a rich variety of agents make this task more challenging than common time-series forecasting. In this letter, we aim to explore a distinct formulation for multi-agent trajectory prediction framework. Specifically, we proposed a patching-based temporal feature extraction module and a graph-based social feature extraction module, enabling effective feature extraction and cross-scenario generalization. Moreover, we reassess the role of social interaction and present a novel method based on explicit modality modulation to integrate temporal and social features, thereby constructing an efficient single-stage inference pipeline. Results on public benchmark datasets demonstrate the superior performance of our model compared with the state-of-the-art methods. The code is available at: github.com/TIB-K330/pmm-net.
FlexDelta: A flexure-based fully decoupled parallel $xyz$ positioning stage with long stroke
Jul 19, 2023Decoupled parallel $xyz$ positioning stages with large stroke have been desired in high-speed and precise positioning fields. However, currently such stages are either short in stroke or unqualified in parasitic motion and coupling rate. This paper proposes a novel flexure-based decoupled parallel $xyz$ positioning stage (FlexDelta) and conducts its conceptual design, modeling, and experimental study. Firstly, the working principle of FlexDelta is introduced, followed by its mechanism design with flexure. Secondly, the stiffness model of flexure is established via matrix-based Castigliano's second theorem, and the influence of its lateral stiffness on the stiffness model of FlexDelta is comprehensively investigated and then optimally designed. Finally, experimental study was carried out based on the prototype fabricated. The results reveal that the positioning stage features centimeter-stroke in three axes, with coupling rate less than 0.53%, parasitic motion less than 1.72 mrad over full range. And its natural frequencies are 20.8 Hz, 20.8 Hz, and 22.4 Hz for $x$, $y$, and $z$ axis respectively. Multi-axis path tracking tests were also carried out, which validates its dynamic performance with micrometer error.