 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstructing Behavior Trees from Temporal Plans for Robotic Applications
Jun 25, 2024



Executing temporal plans in the real and open world requires adapting to uncertainty both in the environment and in the plan actions. A plan executor must therefore be flexible to dispatch actions based on the actual execution conditions. In general, this involves considering both event and time-based constraints between the actions in the plan. A simple temporal network (STN) is a convenient framework for specifying the constraints between actions in the plan. Likewise, a behavior tree (BT) is a convenient framework for controlling the execution flow of the actions in the plan. The principle contributions of this paper are i) an algorithm for transforming a plan into an STN, and ii) an algorithm for transforming an STN into a BT. When combined, these algorithms define a systematic approach for executing total-order (time-triggered) plans in robots operating in the real world. Our approach is based on creating a graph describing a deordered (state-triggered) plan and then creating a BT representing a partial-order (determined at runtime) plan. This approach ensures the correct execution of plans, including those with required concurrency. We demonstrate the validity of our approach within the PlanSys2 framework on real robots.
Regulated Pure Pursuit for Robot Path Tracking
May 31, 2023The accelerated deployment of service robots have spawned a number of algorithm variations to better handle real-world conditions. Many local trajectory planning techniques have been deployed on practical robot systems successfully. While most formulations of Dynamic Window Approach and Model Predictive Control can progress along paths and optimize for additional criteria, the use of pure path tracking algorithms is still commonplace. Decades later, Pure Pursuit and its variants continues to be one of the most commonly utilized classes of local trajectory planners. However, few Pure Pursuit variants have been proposed with schema for variable linear velocities - they either assume a constant velocity or fails to address the point at all. This paper presents a variant of Pure Pursuit designed with additional heuristics to regulate linear velocities, built atop the existing Adaptive variant. The Regulated Pure Pursuit algorithm makes incremental improvements on state of the art by adjusting linear velocities with particular focus on safety in constrained and partially observable spaces commonly negotiated by deployed robots. We present experiments with the Regulated Pure Pursuit algorithm on industrial-grade service robots. We also provide a high-quality reference implementation that is freely included ROS 2 Nav2 framework at https://github.com/ros-planning/navigation2 for fast evaluation.
Portable Multi-Hypothesis Monte Carlo Localization for Mobile Robots
Sep 15, 2022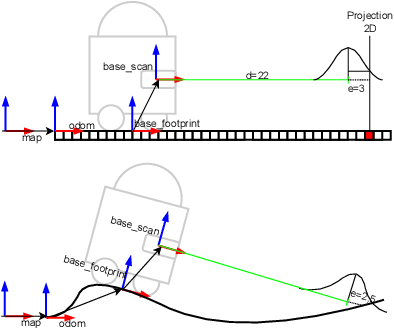
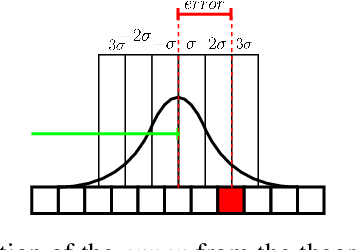
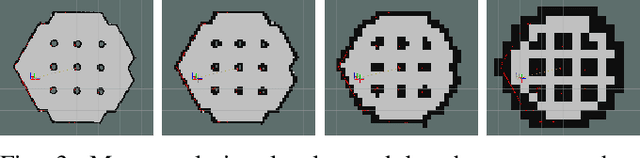
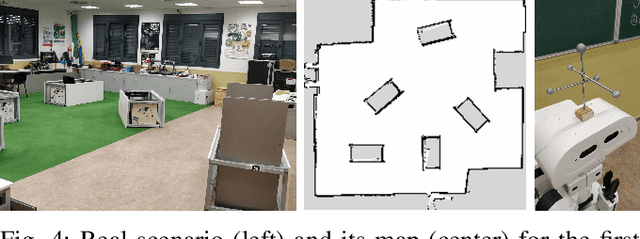
Self-localization is a fundamental capability that mobile robot navigation systems integrate to move from one point to another using a map. Thus, any enhancement in localization accuracy is crucial to perform delicate dexterity tasks. This paper describes a new location that maintains several populations of particles using the Monte Carlo Localization (MCL) algorithm, always choosing the best one as the sytems's output. As novelties, our work includes a multi-scale match matching algorithm to create new MCL populations and a metric to determine the most reliable. It also contributes the state-of-the-art implementations, enhancing recovery times from erroneous estimates or unknown initial positions. The proposed method is evaluated in ROS2 in a module fully integrated with Nav2 and compared with the current state-of-the-art Adaptive ACML solution, obtaining good accuracy and recovery times.