 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-Source, Cost-Aware Kinematically Feasible Planning for Mobile and Surface Robotics
Jan 23, 2024



This paper introduces the Smac Planner, an openly available search-based planning framework with multiple algorithm implementations including 2D-A*, Hybrid-A*, and State Lattice planners. This work is motivated by the lack of performant and available feasible planners for mobile and surface robotics research. This paper contains three main contributions. First, it briefly describes a minimal open-source software framework where search-based planners may be easily added. Further, this paper characterizes new variations on the feasible planners - dubbed Cost-Aware - specific to mobile roboticist's needs. This fills the gap of missing kinematically feasible implementations suitable for academic, extension, and deployed use. Finally, we provide baseline benchmarking against other standard planning frameworks. Smac Planner has further significance by becoming the standard open-source planning system within ROS 2's Nav2 framework which powers thousands of robots in research and industry.
From the Desks of ROS Maintainers: A Survey of Modern & Capable Mobile Robotics Algorithms in the Robot Operating System 2
Jul 31, 2023



The Robot Operating System 2 (ROS 2) is rapidly impacting the intelligent machines sector -- on space missions, large agriculture equipment, multi-robot fleets, and more. Its success derives from its focused design and improved capabilities targeting product-grade and modern robotic systems. Following ROS 2's example, the mobile robotics ecosystem has been fully redesigned based on the transformed needs of modern robots and is experiencing active development not seen since its inception. This paper comes from the desks of the key ROS Navigation maintainers to review and analyze the state of the art of robotics navigation in ROS 2. This includes new systems without parallel in ROS 1 or other similar mobile robotics frameworks. We discuss current research products and historically robust methods that provide differing behaviors and support for most every robot type. This survey consists of overviews, comparisons, and expert insights organized by the fundamental problems in the field. Some of these implementations have yet to be described in literature and many have not been benchmarked relative to others. We end by providing a glimpse into the future of the ROS 2 mobile robotics ecosystem.
Regulated Pure Pursuit for Robot Path Tracking
May 31, 2023The accelerated deployment of service robots have spawned a number of algorithm variations to better handle real-world conditions. Many local trajectory planning techniques have been deployed on practical robot systems successfully. While most formulations of Dynamic Window Approach and Model Predictive Control can progress along paths and optimize for additional criteria, the use of pure path tracking algorithms is still commonplace. Decades later, Pure Pursuit and its variants continues to be one of the most commonly utilized classes of local trajectory planners. However, few Pure Pursuit variants have been proposed with schema for variable linear velocities - they either assume a constant velocity or fails to address the point at all. This paper presents a variant of Pure Pursuit designed with additional heuristics to regulate linear velocities, built atop the existing Adaptive variant. The Regulated Pure Pursuit algorithm makes incremental improvements on state of the art by adjusting linear velocities with particular focus on safety in constrained and partially observable spaces commonly negotiated by deployed robots. We present experiments with the Regulated Pure Pursuit algorithm on industrial-grade service robots. We also provide a high-quality reference implementation that is freely included ROS 2 Nav2 framework at https://github.com/ros-planning/navigation2 for fast evaluation.
Impact of ROS 2 Node Composition in Robotic Systems
May 17, 2023



The Robot Operating System 2 (ROS 2) is the second generation of ROS representing a step forward in the robotic framework. Several new types of nodes and executor models are integral to control where, how, and when information is processed in the computational graph. This paper explores and benchmarks one of these new node types -- the Component node -- which allows nodes to be composed manually or dynamically into processes while retaining separation of concerns in a codebase for distributed development. Composition is shown to achieve a high degree of performance optimization, particularly valuable for resource-constrained systems and sensor processing pipelines, enabling distributed tasks that would not be otherwise possible in ROS 2. In this work, we briefly introduce the significance and design of node composition, then our contribution of benchmarking is provided to analyze its impact on robotic systems. Its compelling influence on performance is shown through several experiments on the latest Long Term Support (LTS) ROS 2 distribution, Humble Hawksbill.
Robot Operating System 2: Design, Architecture, and Uses In The Wild
Nov 14, 2022The next chapter of the robotics revolution is well underway with the deployment of robots for a broad range of commercial use-cases. Even in a myriad of applications and environments, there exists a common vocabulary of components that robots share - the need for a modular, scalable, and reliable architecture; sensing; planning; mobility; and autonomy. The Robot Operating System (ROS) was an integral part of the last chapter, demonstrably expediting robotics research with freely-available components and a modular framework. However, ROS 1 was not designed with many necessary production-grade features and algorithms. ROS 2 and its related projects have been redesigned from the ground up to meet the challenges set forth by modern robotic systems in new and exploratory domains at all scales. In this review, we highlight the philosophical and architectural changes of ROS 2 powering this new chapter in the robotics revolution. We also show through case studies the influence ROS 2 and its adoption has had on accelerating real robot systems to reliable deployment in an assortment of challenging environments.
* This manuscript has been accepted for publication in Science Robotics. This version has not undergone final editing. Please refer to the complete version of record at https://www.science.org/doi/10.1126/scirobotics.abm6074. The manuscript may not be reproduced or used in any manner that does not fall within the fair use provisions of the Copyright Act without the prior, written permission of AAAS
A Comparison of Modern General-Purpose Visual SLAM Approaches
Aug 05, 2021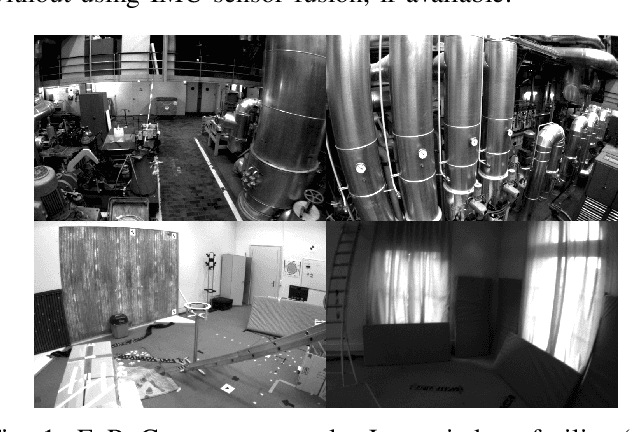

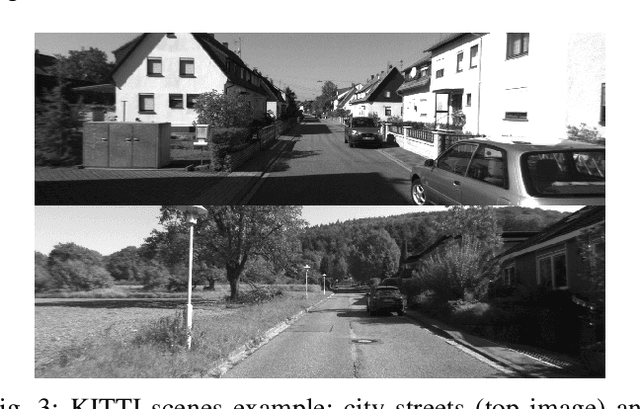
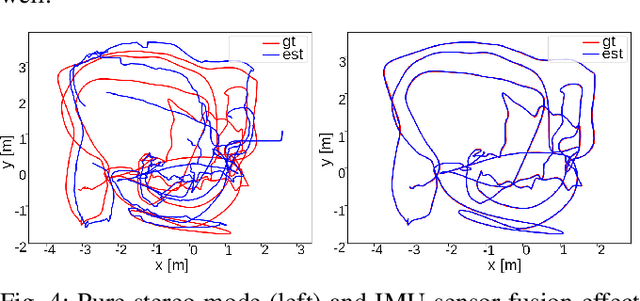
Advancing maturity in mobile and legged robotics technologies is changing the landscapes where robots are being deployed and found. This innovation calls for a transformation in simultaneous localization and mapping (SLAM) systems to support this new generation of service and consumer robots. No longer can traditionally robust 2D lidar systems dominate while robots are being deployed in multi-story indoor, outdoor unstructured, and urban domains with increasingly inexpensive stereo and RGB-D cameras. Visual SLAM (VSLAM) systems have been a topic of study for decades and a small number of openly available implementations have stood out: ORB-SLAM3, OpenVSLAM and RTABMap. This paper presents a comparison of these 3 modern, feature rich, and uniquely robust VSLAM techniques that have yet to be benchmarked against each other, using several different datasets spanning multiple domains negotiated by service robots. ORB-SLAM3 and OpenVSLAM each were not compared against at least one of these datasets previously in literature and we provide insight through this lens. This analysis is motivated to find general purpose, feature complete, and multi-domain VSLAM options to support a broad class of robot applications for integration into the new and improved ROS 2 Nav2 System as suitable alternatives to traditional 2D lidar solutions.
* IROS 2021
The Marathon 2: A Navigation System
Mar 01, 2020
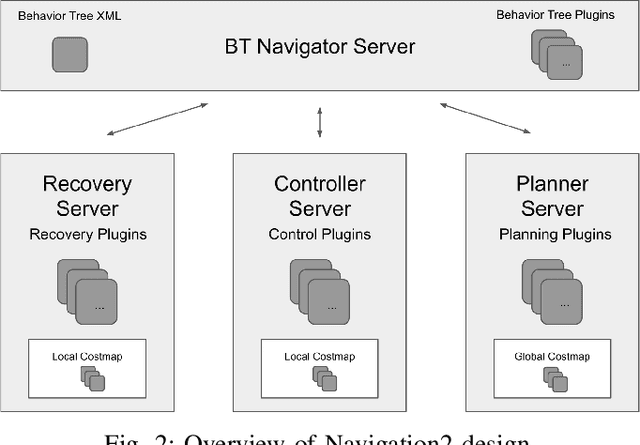
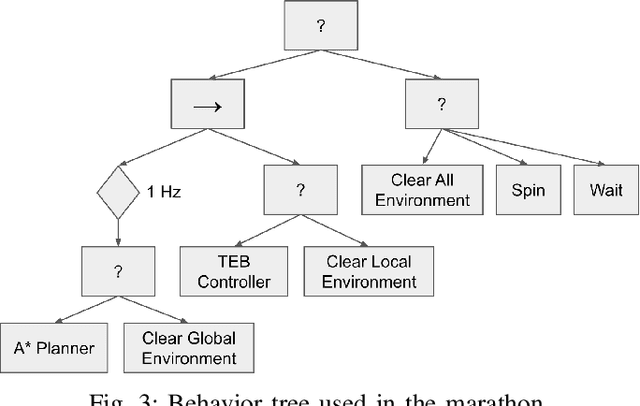
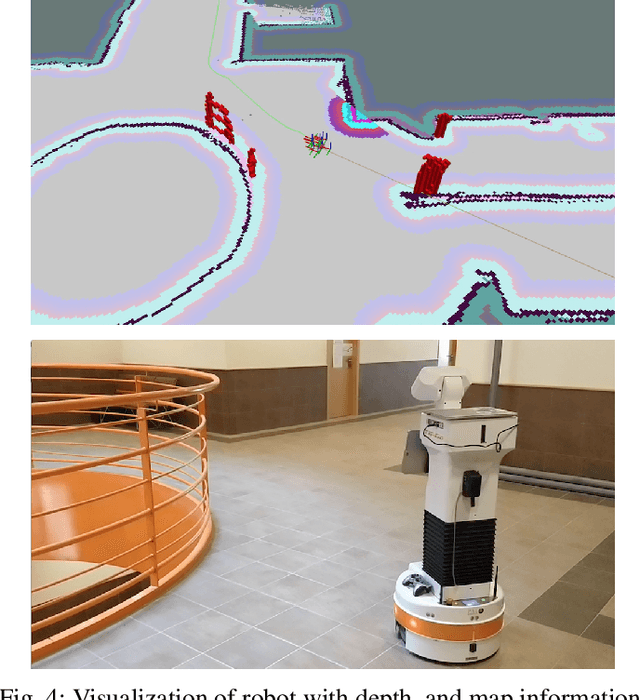
Developments in mobile robot navigation have enabled robots to operate in warehouses, retail stores, and on sidewalks around pedestrians. Various navigation solutions have been proposed, though few as widely adopted as ROS Navigation. 10 years on, it is still one of the most popular navigation solutions. Yet, ROS Navigation has failed to keep up with modern trends. We propose the new navigation solution, Navigation2, which builds on the successful legacy of ROS Navigation. Navigation2 uses a behavior tree for navigator task orchestration and employs new methods designed for dynamic environments applicable to a wider variety of modern sensors. It is built on top of ROS2, a secure message passing framework suitable for safety critical applications and program lifecycle management. We present experiments in a campus setting utilizing Navigation2 to operate safely alongside students over a marathon as an extension of the experiment proposed in Eppstein et al. The Navigation2 system is freely available at https://github.com/ros-planning/navigation2 with a rich community and instructions.