 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom the Desks of ROS Maintainers: A Survey of Modern & Capable Mobile Robotics Algorithms in the Robot Operating System 2
Jul 31, 2023



The Robot Operating System 2 (ROS 2) is rapidly impacting the intelligent machines sector -- on space missions, large agriculture equipment, multi-robot fleets, and more. Its success derives from its focused design and improved capabilities targeting product-grade and modern robotic systems. Following ROS 2's example, the mobile robotics ecosystem has been fully redesigned based on the transformed needs of modern robots and is experiencing active development not seen since its inception. This paper comes from the desks of the key ROS Navigation maintainers to review and analyze the state of the art of robotics navigation in ROS 2. This includes new systems without parallel in ROS 1 or other similar mobile robotics frameworks. We discuss current research products and historically robust methods that provide differing behaviors and support for most every robot type. This survey consists of overviews, comparisons, and expert insights organized by the fundamental problems in the field. Some of these implementations have yet to be described in literature and many have not been benchmarked relative to others. We end by providing a glimpse into the future of the ROS 2 mobile robotics ecosystem.
A Comparison of Modern General-Purpose Visual SLAM Approaches
Aug 05, 2021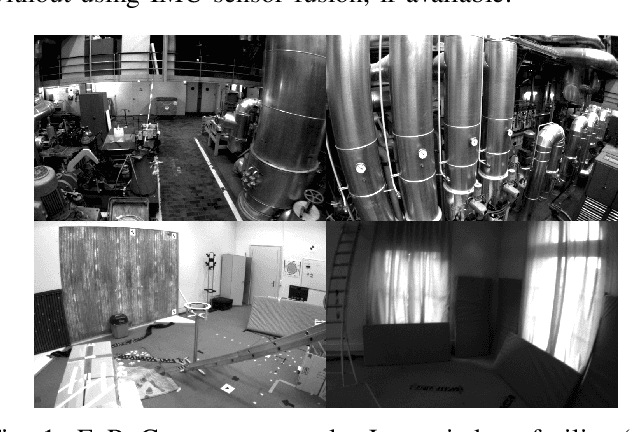

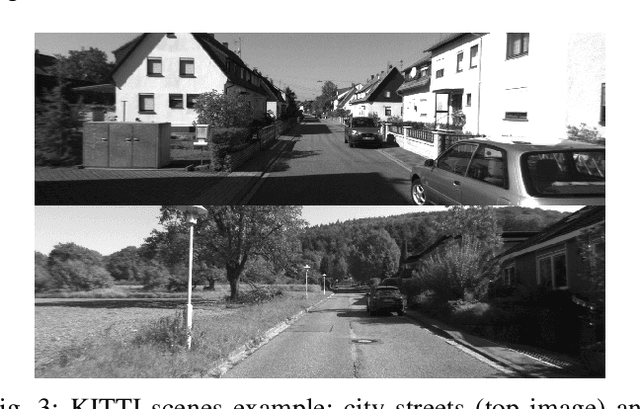
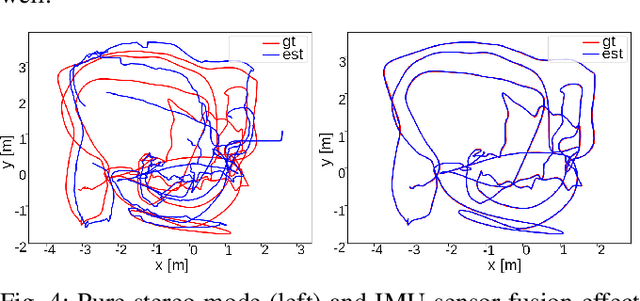
Advancing maturity in mobile and legged robotics technologies is changing the landscapes where robots are being deployed and found. This innovation calls for a transformation in simultaneous localization and mapping (SLAM) systems to support this new generation of service and consumer robots. No longer can traditionally robust 2D lidar systems dominate while robots are being deployed in multi-story indoor, outdoor unstructured, and urban domains with increasingly inexpensive stereo and RGB-D cameras. Visual SLAM (VSLAM) systems have been a topic of study for decades and a small number of openly available implementations have stood out: ORB-SLAM3, OpenVSLAM and RTABMap. This paper presents a comparison of these 3 modern, feature rich, and uniquely robust VSLAM techniques that have yet to be benchmarked against each other, using several different datasets spanning multiple domains negotiated by service robots. ORB-SLAM3 and OpenVSLAM each were not compared against at least one of these datasets previously in literature and we provide insight through this lens. This analysis is motivated to find general purpose, feature complete, and multi-domain VSLAM options to support a broad class of robot applications for integration into the new and improved ROS 2 Nav2 System as suitable alternatives to traditional 2D lidar solutions.
* IROS 2021