 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse Phased Array Optimization Using Deep Learning
Apr 23, 2025Antenna arrays are widely used in wireless communication, radar systems, radio astronomy, and military defense to enhance signal strength, directivity, and interference suppression. We introduce a deep learning-based optimization approach that enhances the design of sparse phased arrays by reducing grating lobes. This approach begins by generating sparse array configurations to address the non-convex challenges and extensive degrees of freedom inherent in array design. We use neural networks to approximate the non-convex cost function that estimates the energy ratio between the main and side lobes. This differentiable approximation facilitates cost function minimization through gradient descent, optimizing the antenna elements' coordinates and leading to an improved layout. Additionally, we incorporate a tailored penalty mechanism that includes various physical and design constraints into the optimization process, enhancing its robustness and practical applicability. We demonstrate the effectiveness of our method by applying it to the ten array configurations with the lowest initial costs, achieving further cost reductions ranging from 411% to 643%, with an impressive average improvement of 552%. By significantly reducing side lobe levels in antenna arrays, this breakthrough paves the way for ultra-precise beamforming, enhanced interference mitigation, and next-generation wireless and radar systems with unprecedented efficiency and clarity.
From the Desks of ROS Maintainers: A Survey of Modern & Capable Mobile Robotics Algorithms in the Robot Operating System 2
Jul 31, 2023



The Robot Operating System 2 (ROS 2) is rapidly impacting the intelligent machines sector -- on space missions, large agriculture equipment, multi-robot fleets, and more. Its success derives from its focused design and improved capabilities targeting product-grade and modern robotic systems. Following ROS 2's example, the mobile robotics ecosystem has been fully redesigned based on the transformed needs of modern robots and is experiencing active development not seen since its inception. This paper comes from the desks of the key ROS Navigation maintainers to review and analyze the state of the art of robotics navigation in ROS 2. This includes new systems without parallel in ROS 1 or other similar mobile robotics frameworks. We discuss current research products and historically robust methods that provide differing behaviors and support for most every robot type. This survey consists of overviews, comparisons, and expert insights organized by the fundamental problems in the field. Some of these implementations have yet to be described in literature and many have not been benchmarked relative to others. We end by providing a glimpse into the future of the ROS 2 mobile robotics ecosystem.
LaneAF: Robust Multi-Lane Detection with Affinity Fields
Apr 02, 2021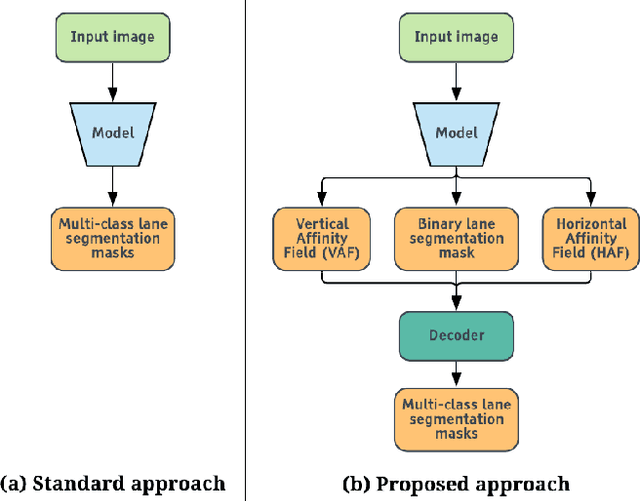
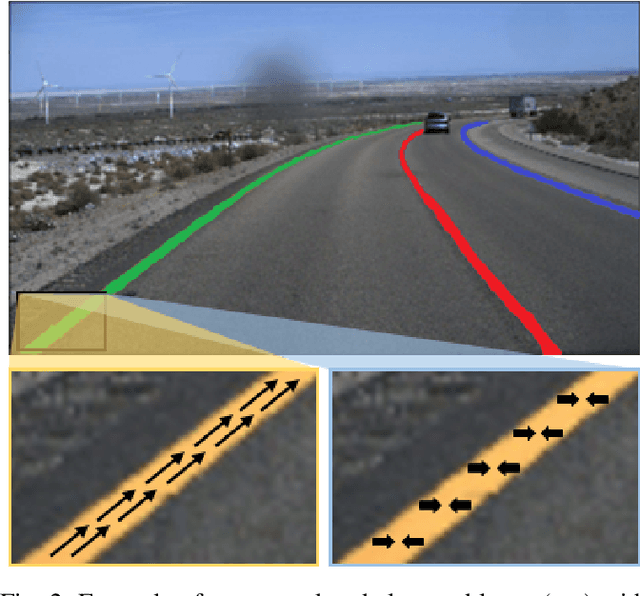
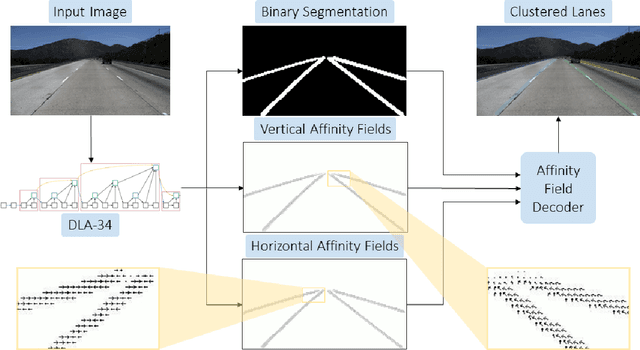
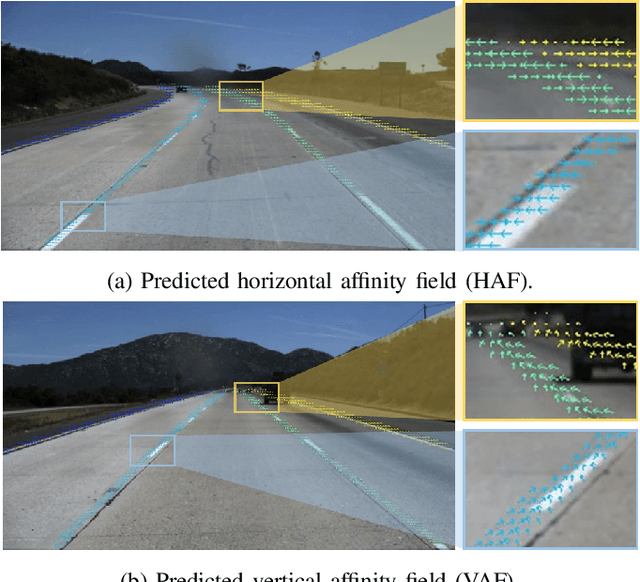
This study presents an approach to lane detection involving the prediction of binary segmentation masks and per-pixel affinity fields. These affinity fields, along with the binary masks, can then be used to cluster lane pixels horizontally and vertically into corresponding lane instances in a post-processing step. This clustering is achieved through a simple row-by-row decoding process with little overhead; such an approach allows LaneAF to detect a variable number of lanes without assuming a fixed or maximum number of lanes. Moreover, this form of clustering is more interpretable in comparison to previous visual clustering approaches, and can be analyzed to identify and correct sources of error. Qualitative and quantitative results obtained on popular lane detection datasets demonstrate the model's ability to detect and cluster lanes effectively and robustly. Our proposed approach performs on par with state-of-the-art approaches on the limited TuSimple benchmark, and sets a new state-of-the-art on the challenging CULane dataset.
Var-CNN and DynaFlow: Improved Attacks and Defenses for Website Fingerprinting
Feb 28, 2018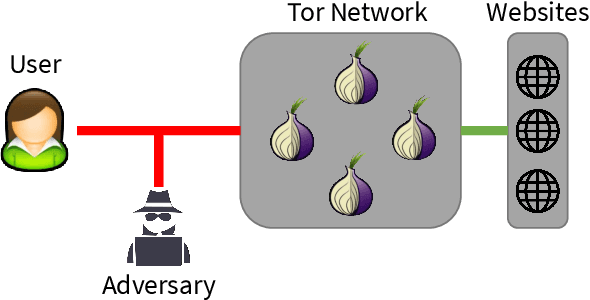

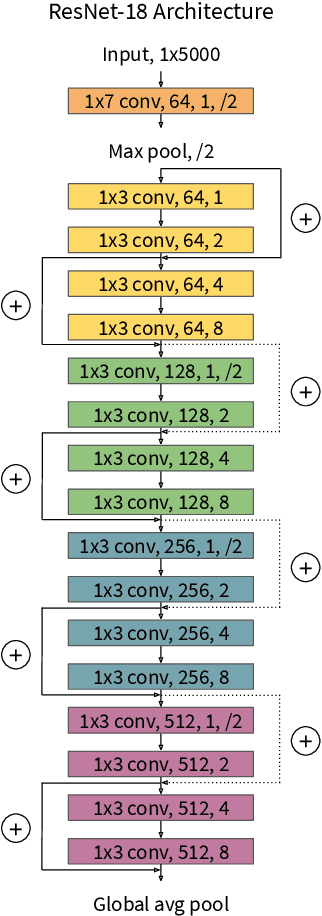

In recent years, there have been many works that use website fingerprinting techniques to enable a local adversary to determine which website a Tor user is visiting. However, most of these works rely on manually extracted features, and thus are fragile: a small change in the protocol or a simple defense often renders these attacks useless. In this work, we leverage deep learning techniques to create a more robust attack that does not require any manually extracted features. Specifically, we propose Var-CNN, an attack that uses model variations on convolutional neural networks with both the packet sequence and packet timing data. In open-world settings, Var-CNN attains higher true positive rate and lower false positive rate than any prior work at 90.9% and 0.3%, respectively. Moreover, these improvements are observed even with low amounts of training data, where deep learning techniques often suffer. Given the severity of our attacks, we also introduce a new countermeasure, DynaFlow, based on dynamically adjusting flows to protect against website fingerprinting attacks. DynaFlow provides a similar level of security as current state-of-the-art and defeats all attacks, including our own, while being over 40% more efficient than existing defenses. Moreover, unlike many prior defenses, DynaFlow can protect dynamically generated websites as well.