 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-Source, Cost-Aware Kinematically Feasible Planning for Mobile and Surface Robotics
Jan 23, 2024



This paper introduces the Smac Planner, an openly available search-based planning framework with multiple algorithm implementations including 2D-A*, Hybrid-A*, and State Lattice planners. This work is motivated by the lack of performant and available feasible planners for mobile and surface robotics research. This paper contains three main contributions. First, it briefly describes a minimal open-source software framework where search-based planners may be easily added. Further, this paper characterizes new variations on the feasible planners - dubbed Cost-Aware - specific to mobile roboticist's needs. This fills the gap of missing kinematically feasible implementations suitable for academic, extension, and deployed use. Finally, we provide baseline benchmarking against other standard planning frameworks. Smac Planner has further significance by becoming the standard open-source planning system within ROS 2's Nav2 framework which powers thousands of robots in research and industry.
Self-Exploration in Complex Unknown Environments using Hybrid Map Representation
Apr 18, 2020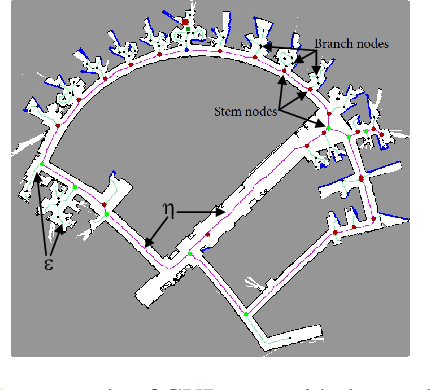
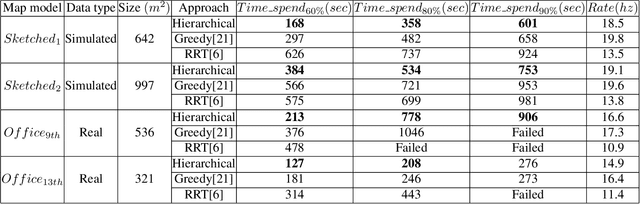
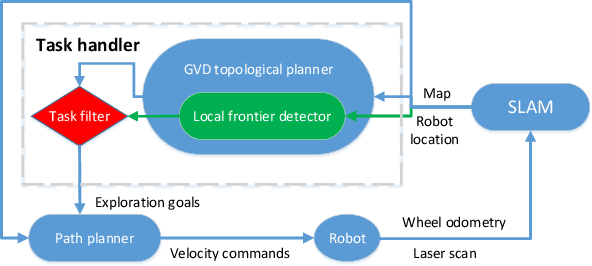
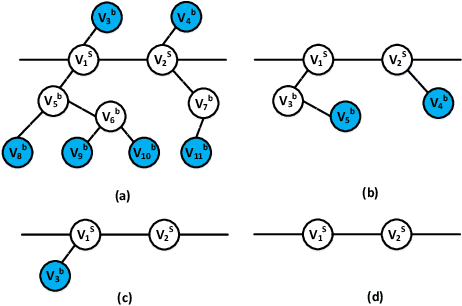
A hybrid map representation, which consists of a modified generalized Voronoi Diagram (GVD)-based topological map and a grid-based metric map, is proposed to facilitate a new frontier-driven exploration strategy. Exploration frontiers are the regions on the boundary between open space and unexplored space. A mobile robot is able to construct its map by adding new space and moving to unvisited frontiers until the entire environment has been explored. The existing exploration methods suffer from low exploration efficiency in complex environments due to the lack of a systematical way to determine and assign optimal exploration command. Leveraging on the abstracted information from the GVD map (global) and the detected frontier in the local sliding window, a global-local exploration strategy is proposed to handle the exploration task in a hierarchical manner. The new exploration algorithm is able to create a modified tree structure to represent the environment while consolidating global frontier information during the self-exploration. The proposed method is verified in simulated environments, and then tested in real-world office environments as well.