 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeI Move Therefore I Learn: Experience-Based Traversability in Outdoor Robotics
Jul 01, 2025Accurate traversability estimation is essential for safe and effective navigation of outdoor robots operating in complex environments. This paper introduces a novel experience-based method that allows robots to autonomously learn which terrains are traversable based on prior navigation experience, without relying on extensive pre-labeled datasets. The approach integrates elevation and texture data into multi-layered grid maps, which are processed using a variational autoencoder (VAE) trained on a generic texture dataset. During an initial teleoperated phase, the robot collects sensory data while moving around the environment. These experiences are encoded into compact feature vectors and clustered using the BIRCH algorithm to represent traversable terrain areas efficiently. In deployment, the robot compares new terrain patches to its learned feature clusters to assess traversability in real time. The proposed method does not require training with data from the targeted scenarios, generalizes across diverse surfaces and platforms, and dynamically adapts as new terrains are encountered. Extensive evaluations on both synthetic benchmarks and real-world scenarios with wheeled and legged robots demonstrate its effectiveness, robustness, and superior adaptability compared to state-of-the-art approaches.
Towards a Robotic Intrusion Prevention System: Combining Security and Safety in Cognitive Social Robots
Jul 09, 2024



Social Robots need to be safe and reliable to share their space with humans. This paper reports on the first results of a research project that aims to create more safe and reliable, intelligent autonomous robots by investigating the implications and interactions between cybersecurity and safety. We propose creating a robotic intrusion prevention system (RIPS) that follows a novel approach to detect and mitigate intrusions in cognitive social robot systems and other cyber-physical systems. The RIPS detects threats at the robotic communication level and enables mitigation of the cyber-physical threats by using System Modes to define what part of the robotic system reduces or limits its functionality while the system is compromised. We demonstrate the validity of our approach by applying it to a cognitive architecture running in a real social robot that preserves the privacy and safety of humans while facing several cyber attack situations.
KANT: A tool for Grounding and Knowledge Management
Apr 18, 2022
The intelligent robotics community usually organizes knowledge into symbolic and sub-symbolic levels. These two levels establish the set of symbols and rules for manipulating knowledge based on their (symbol system - dictionary). Thus, the correspondences -- Grounding or knowledge representation -- require specific software techniques for anchoring continuous and discrete state variables between these two levels. This paper presents the design and evaluation of an Open Source tool called KANT(Knowledge mAnagemeNT) to let different components of the system architecture controlling the robot query, save, edit, and delete the data from the Knowledge Base without having to worry about the type and the implementation of the source data. Using KANT, components managing subsymbolic information can smoothly interact with symbolic components. Besides, implementation mechanisms used in KANT, such as the use of in-memory and non-SQL databases, improve the performance of the knowledge management systems in ROS middleware, as shown by the evaluations presented in this work.
PlanSys2: A Planning System Framework for ROS2
Jul 01, 2021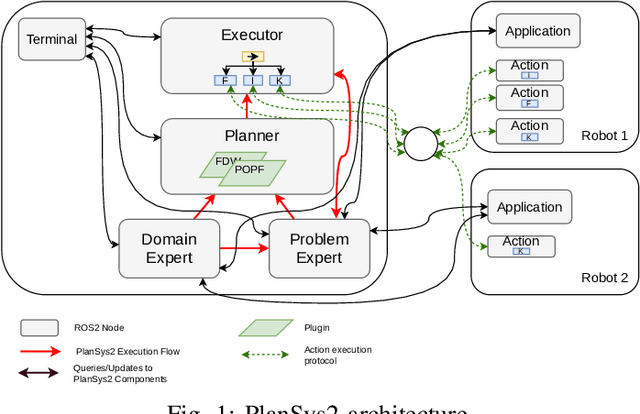
Autonomous robots need to plan the tasks they carry out to fulfill their missions. The missions' increasing complexity does not let human designers anticipate all the possible situations, so traditional control systems based on state machines are not enough. This paper contains a description of the ROS2 Planning System (PlanSys2 in short), a framework for symbolic planning that incorporates novel approaches for execution on robots working in demanding environments. PlanSys2 aims to be the reference task planning framework in ROS2, the latest version of the {\em de facto} standard in robotics software development. Among its main features, it can be highlighted the optimized execution, based on Behavior Trees, of plans through a new actions auction protocol and its multi-robot planning capabilities. It already has a small but growing community of users and developers, and this document is a summary of the design and capabilities of this project.
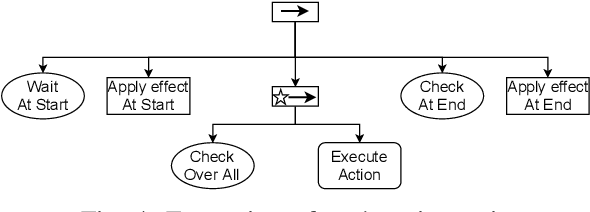
Optimized Execution of PDDL Plans using Behavior Trees
Jan 11, 2021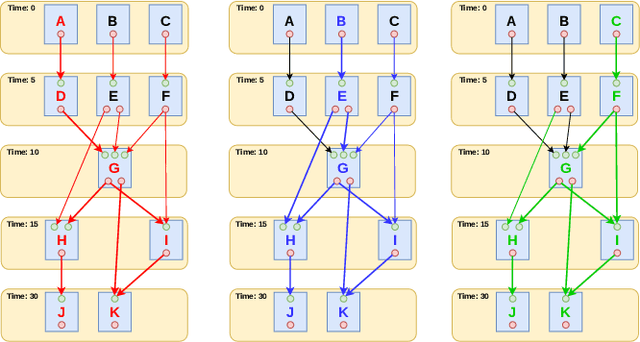
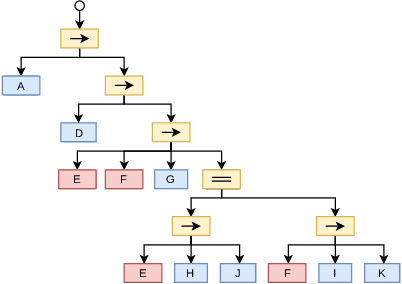

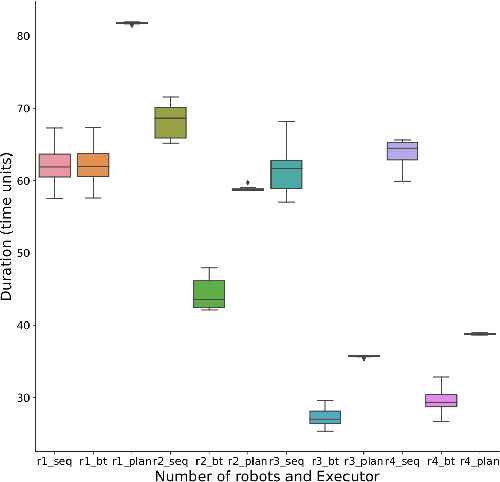
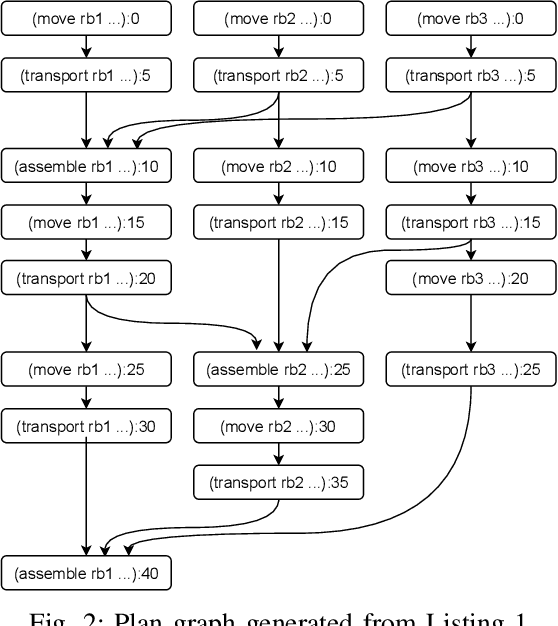
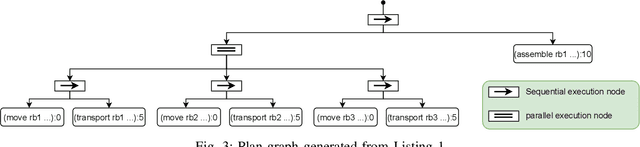
Robots need task planning to sequence and execute actions toward achieving their goals. On the other hand, Behavior Trees provide a mathematical model for specifying plan execution in an intrinsically composable, reactive, and robust way. PDDL (Planning Domain Definition Language) has become the standard description language for most planners. In this paper, we present a novel algorithm to systematically create behavior trees from PDDL plans to execute them. This approach uses the execution graph of the plan to generate a behavior tree. The most remarkable contribution of this approach is the algorithm to build a Behavior Tree that optimizes its execution by paralyzing actions, applicable to any plan, taking into account the actions' causal relationships. We demonstrate the improvement in the execution of plans in mobile robots using the ROS2 Planning System framework.
The Marathon 2: A Navigation System
Mar 01, 2020
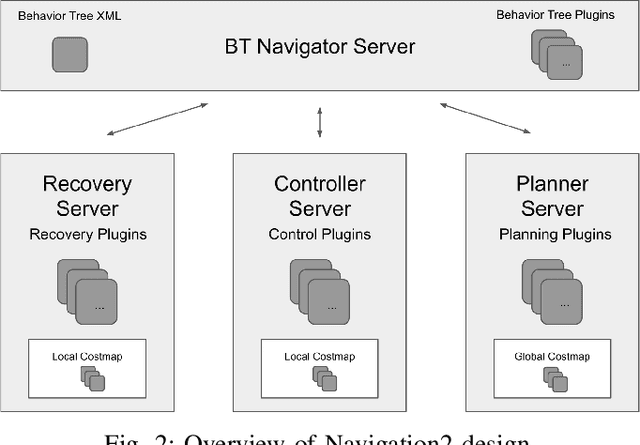
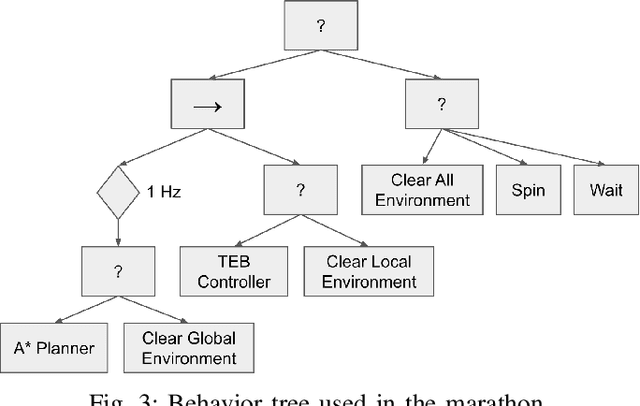
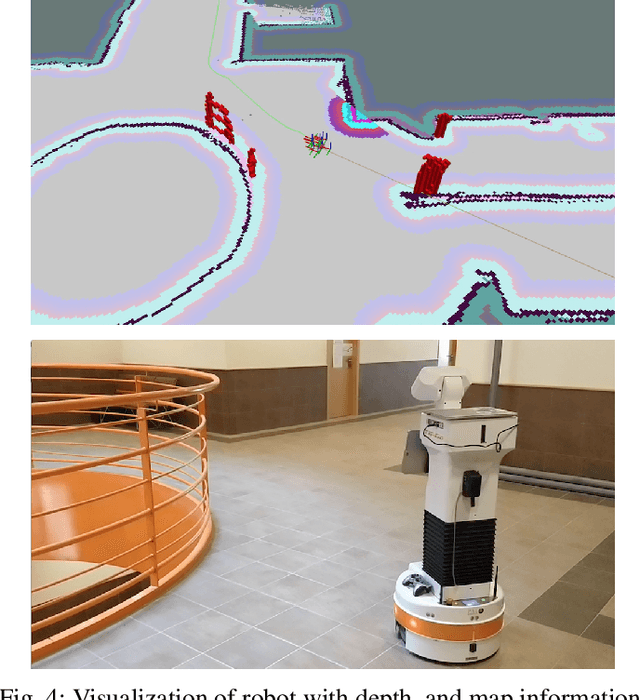
Developments in mobile robot navigation have enabled robots to operate in warehouses, retail stores, and on sidewalks around pedestrians. Various navigation solutions have been proposed, though few as widely adopted as ROS Navigation. 10 years on, it is still one of the most popular navigation solutions. Yet, ROS Navigation has failed to keep up with modern trends. We propose the new navigation solution, Navigation2, which builds on the successful legacy of ROS Navigation. Navigation2 uses a behavior tree for navigator task orchestration and employs new methods designed for dynamic environments applicable to a wider variety of modern sensors. It is built on top of ROS2, a secure message passing framework suitable for safety critical applications and program lifecycle management. We present experiments in a campus setting utilizing Navigation2 to operate safely alongside students over a marathon as an extension of the experiment proposed in Eppstein et al. The Navigation2 system is freely available at https://github.com/ros-planning/navigation2 with a rich community and instructions.