 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKANT: A tool for Grounding and Knowledge Management
Apr 18, 2022
The intelligent robotics community usually organizes knowledge into symbolic and sub-symbolic levels. These two levels establish the set of symbols and rules for manipulating knowledge based on their (symbol system - dictionary). Thus, the correspondences -- Grounding or knowledge representation -- require specific software techniques for anchoring continuous and discrete state variables between these two levels. This paper presents the design and evaluation of an Open Source tool called KANT(Knowledge mAnagemeNT) to let different components of the system architecture controlling the robot query, save, edit, and delete the data from the Knowledge Base without having to worry about the type and the implementation of the source data. Using KANT, components managing subsymbolic information can smoothly interact with symbolic components. Besides, implementation mechanisms used in KANT, such as the use of in-memory and non-SQL databases, improve the performance of the knowledge management systems in ROS middleware, as shown by the evaluations presented in this work.
PlanSys2: A Planning System Framework for ROS2
Jul 01, 2021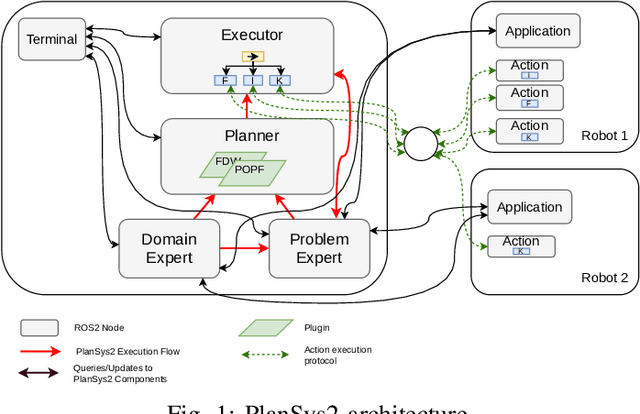
Autonomous robots need to plan the tasks they carry out to fulfill their missions. The missions' increasing complexity does not let human designers anticipate all the possible situations, so traditional control systems based on state machines are not enough. This paper contains a description of the ROS2 Planning System (PlanSys2 in short), a framework for symbolic planning that incorporates novel approaches for execution on robots working in demanding environments. PlanSys2 aims to be the reference task planning framework in ROS2, the latest version of the {\em de facto} standard in robotics software development. Among its main features, it can be highlighted the optimized execution, based on Behavior Trees, of plans through a new actions auction protocol and its multi-robot planning capabilities. It already has a small but growing community of users and developers, and this document is a summary of the design and capabilities of this project.
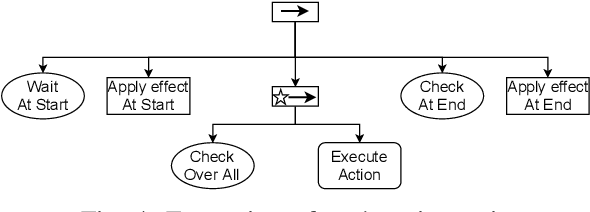
Optimized Execution of PDDL Plans using Behavior Trees
Jan 11, 2021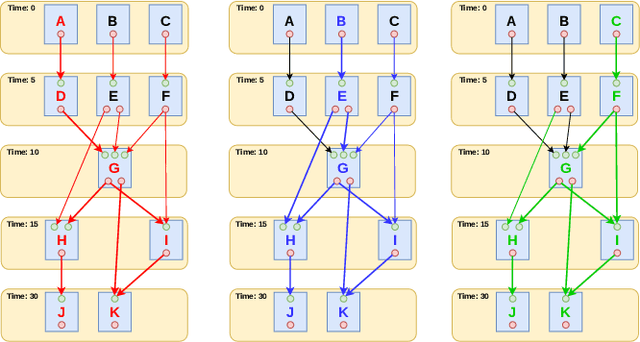
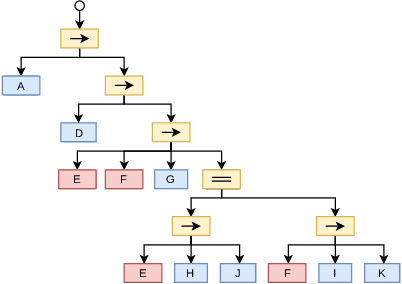

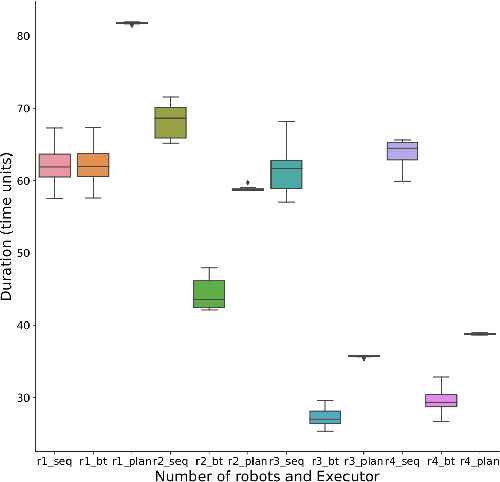
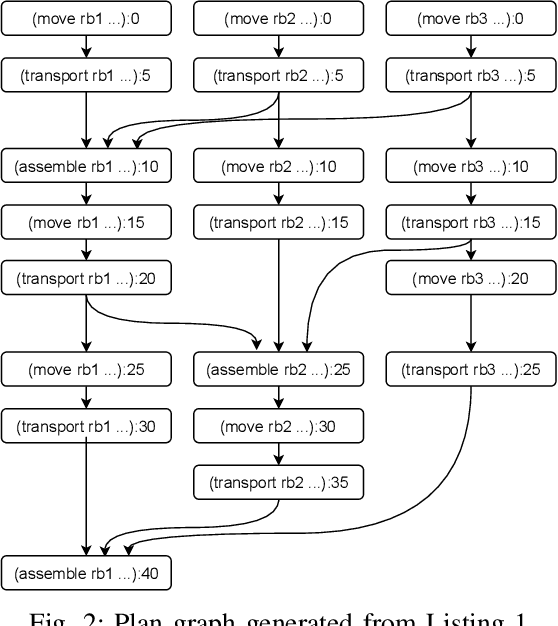
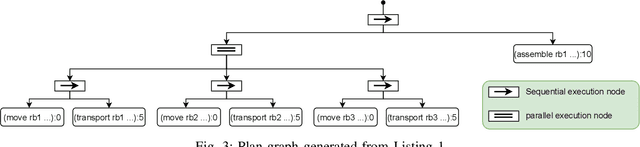
Robots need task planning to sequence and execute actions toward achieving their goals. On the other hand, Behavior Trees provide a mathematical model for specifying plan execution in an intrinsically composable, reactive, and robust way. PDDL (Planning Domain Definition Language) has become the standard description language for most planners. In this paper, we present a novel algorithm to systematically create behavior trees from PDDL plans to execute them. This approach uses the execution graph of the plan to generate a behavior tree. The most remarkable contribution of this approach is the algorithm to build a Behavior Tree that optimizes its execution by paralyzing actions, applicable to any plan, taking into account the actions' causal relationships. We demonstrate the improvement in the execution of plans in mobile robots using the ROS2 Planning System framework.