 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Dependable Autonomous Systems Based on Bayesian Deep Learning Components
Jan 12, 2023



As autonomous systems increasingly rely on Deep Neural Networks (DNN) to implement the navigation pipeline functions, uncertainty estimation methods have become paramount for estimating confidence in DNN predictions. Bayesian Deep Learning (BDL) offers a principled approach to model uncertainties in DNNs. However, in DNN-based systems, not all the components use uncertainty estimation methods and typically ignore the uncertainty propagation between them. This paper provides a method that considers the uncertainty and the interaction between BDL components to capture the overall system uncertainty. We study the effect of uncertainty propagation in a BDL-based system for autonomous aerial navigation. Experiments show that our approach allows us to capture useful uncertainty estimates while slightly improving the system's performance in its final task. In addition, we discuss the benefits, challenges, and implications of adopting BDL to build dependable autonomous systems.
Design Considerations of an Unmanned Aerial Vehicle for Aerial Filming
Dec 21, 2022Filming sport videos from an aerial view has always been a hard and an expensive task to achieve, especially in sports that require a wide open area for its normal development or the ones that put in danger human safety. Recently, a new solution arose for aerial filming based on the use of Unmanned Aerial Vehicles (UAVs), which is substantially cheaper than traditional aerial filming solutions that require conventional aircrafts like helicopters or complex structures for wide mobility. In this paper, we describe the design process followed for building a customized UAV suitable for sports aerial filming. The process includes the requirements definition, technical sizing and selection of mechanical, hardware and software technologies, as well as the whole integration and operation settings. One of the goals is to develop technologies allowing to build low cost UAVs and to manage them for a wide range of usage scenarios while achieving high levels of flexibility and automation. This work also shows some technical issues found during the development of the UAV as well as the solutions implemented.
Quantifying and Using System Uncertainty in UAV Navigation
Jun 04, 2022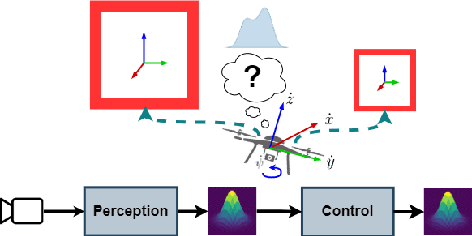
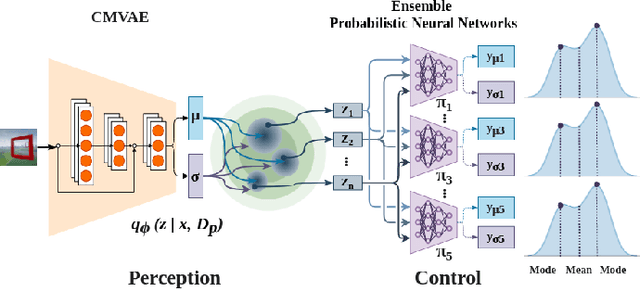
As autonomous systems increasingly rely on Deep Neural Networks (DNN) to implement the navigation pipeline functions, uncertainty estimation methods have become paramount for estimating confidence in DNN predictions. Bayesian Deep Learning (BDL) offers a principled approach to model uncertainties in DNNs. However, DNN components from autonomous systems partially capture uncertainty, or more importantly, the uncertainty effect in downstream tasks is ignored. This paper provides a method to capture the overall system uncertainty in a UAV navigation task. In particular, we study the effect of the uncertainty from perception representations in downstream control predictions. Moreover, we leverage the uncertainty in the system's output to improve control decisions that positively impact the UAV's performance on its task.
Improving Robustness of Deep Neural Networks for Aerial Navigation by Incorporating Input Uncertainty
Oct 29, 2021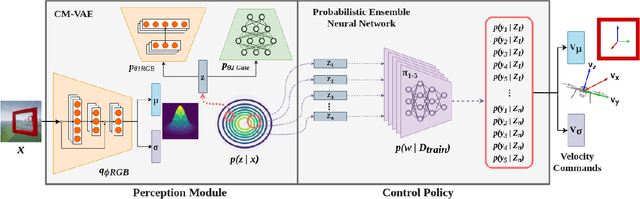
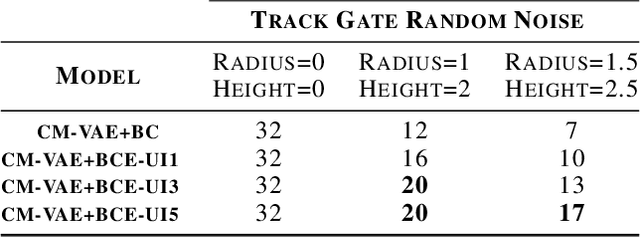
Uncertainty quantification methods are required in autonomous systems that include deep learning (DL) components to assess the confidence of their estimations. However, to successfully deploy DL components in safety-critical autonomous systems, they should also handle uncertainty at the input rather than only at the output of the DL components. Considering a probability distribution in the input enables the propagation of uncertainty through different components to provide a representative measure of the overall system uncertainty. In this position paper, we propose a method to account for uncertainty at the input of Bayesian Deep Learning control policies for Aerial Navigation. Our early experiments show that the proposed method improves the robustness of the navigation policy in Out-of-Distribution (OoD) scenarios.
Optimized Execution of PDDL Plans using Behavior Trees
Jan 11, 2021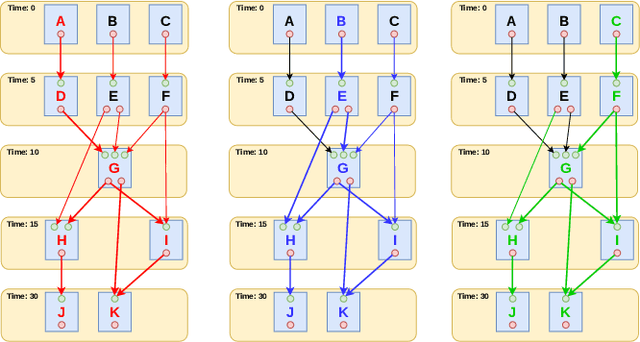
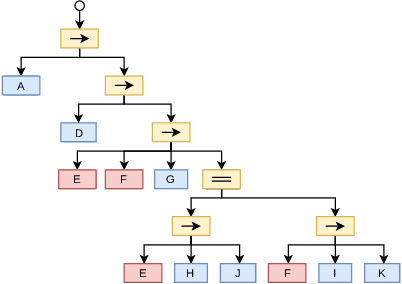

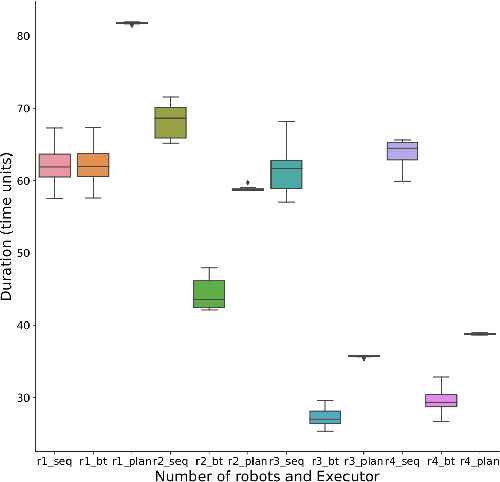
Robots need task planning to sequence and execute actions toward achieving their goals. On the other hand, Behavior Trees provide a mathematical model for specifying plan execution in an intrinsically composable, reactive, and robust way. PDDL (Planning Domain Definition Language) has become the standard description language for most planners. In this paper, we present a novel algorithm to systematically create behavior trees from PDDL plans to execute them. This approach uses the execution graph of the plan to generate a behavior tree. The most remarkable contribution of this approach is the algorithm to build a Behavior Tree that optimizes its execution by paralyzing actions, applicable to any plan, taking into account the actions' causal relationships. We demonstrate the improvement in the execution of plans in mobile robots using the ROS2 Planning System framework.
A Comparison of Uncertainty Estimation Approaches in Deep Learning Components for Autonomous Vehicle Applications
Jul 02, 2020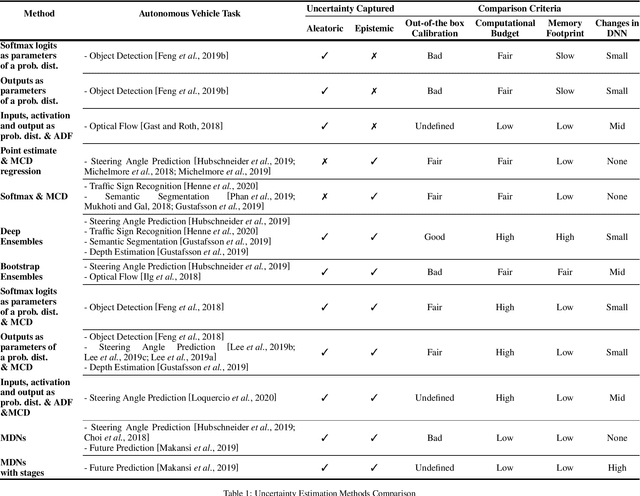
A key factor for ensuring safety in Autonomous Vehicles (AVs) is to avoid any abnormal behaviors under undesirable and unpredicted circumstances. As AVs increasingly rely on Deep Neural Networks (DNNs) to perform safety-critical tasks, different methods for uncertainty quantification have recently been proposed to measure the inevitable source of errors in data and models. However, uncertainty quantification in DNNs is still a challenging task. These methods require a higher computational load, a higher memory footprint, and introduce extra latency, which can be prohibitive in safety-critical applications. In this paper, we provide a brief and comparative survey of methods for uncertainty quantification in DNNs along with existing metrics to evaluate uncertainty predictions. We are particularly interested in understanding the advantages and downsides of each method for specific AV tasks and types of uncertainty sources.