 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuerying Large Automotive Software Models: Agentic vs. Direct LLM Approaches
Jun 16, 2025Large language models (LLMs) offer new opportunities for interacting with complex software artifacts, such as software models, through natural language. They present especially promising benefits for large software models that are difficult to grasp in their entirety, making traditional interaction and analysis approaches challenging. This paper investigates two approaches for leveraging LLMs to answer questions over software models: direct prompting, where the whole software model is provided in the context, and an agentic approach combining LLM-based agents with general-purpose file access tools. We evaluate these approaches using an Ecore metamodel designed for timing analysis and software optimization in automotive and embedded domains. Our findings show that while the agentic approach achieves accuracy comparable to direct prompting, it is significantly more efficient in terms of token usage. This efficiency makes the agentic approach particularly suitable for the automotive industry, where the large size of software models makes direct prompting infeasible, establishing LLM agents as not just a practical alternative but the only viable solution. Notably, the evaluation was conducted using small LLMs, which are more feasible to be executed locally - an essential advantage for meeting strict requirements around privacy, intellectual property protection, and regulatory compliance. Future work will investigate software models in diverse formats, explore more complex agent architectures, and extend agentic workflows to support not only querying but also modification of software models.
Multi-Agent Optimization for Safety Analysis of Cyber-Physical Systems: Position Paper
Mar 25, 2024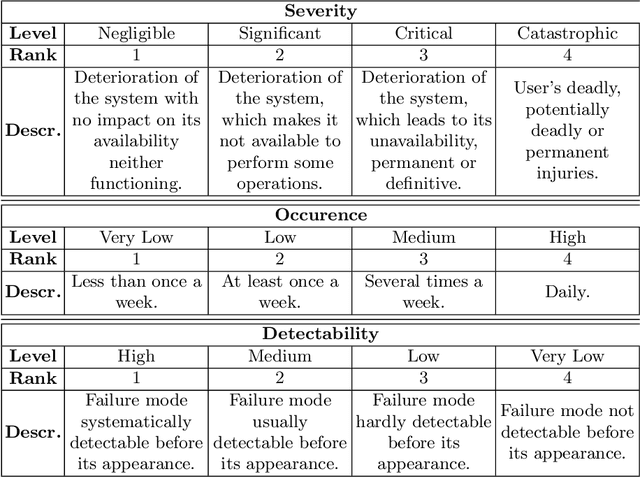
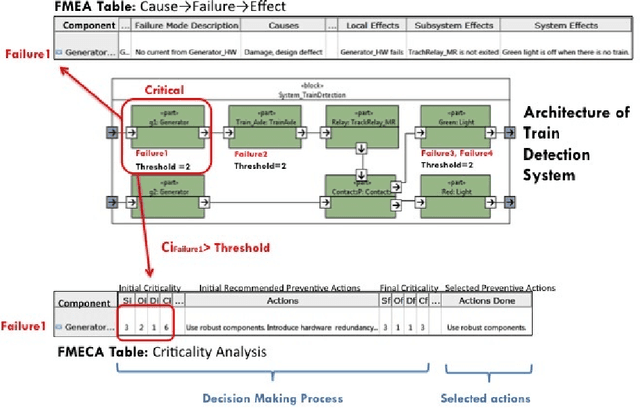
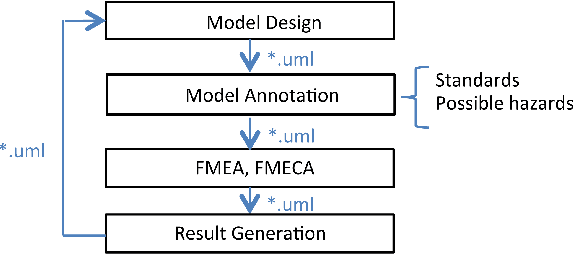
Failure Mode, Effects and Criticality Analysis (FMECA) is one of the safety analysis methods recommended by most of the international standards. The classical FMECA is made in a form of a table filled in either manually or by using safety analysis tools. In both cases, the design engineers have to choose the trade-offs between safety and other development constraints. In the case of complex cyber-physical systems (CPS) with thousands of specified constraints, this may lead to severe problems and significantly impact the overall criticality of CPS. In this paper, we propose to adopt optimization techniques to automate the decision making process conducted after FMECA of CPS. We describe a multi-agent based optimization method which extends classical FMECA for offering optimal solutions in terms of criticality and development constraints of CPS.
Towards Dependable Autonomous Systems Based on Bayesian Deep Learning Components
Jan 12, 2023



As autonomous systems increasingly rely on Deep Neural Networks (DNN) to implement the navigation pipeline functions, uncertainty estimation methods have become paramount for estimating confidence in DNN predictions. Bayesian Deep Learning (BDL) offers a principled approach to model uncertainties in DNNs. However, in DNN-based systems, not all the components use uncertainty estimation methods and typically ignore the uncertainty propagation between them. This paper provides a method that considers the uncertainty and the interaction between BDL components to capture the overall system uncertainty. We study the effect of uncertainty propagation in a BDL-based system for autonomous aerial navigation. Experiments show that our approach allows us to capture useful uncertainty estimates while slightly improving the system's performance in its final task. In addition, we discuss the benefits, challenges, and implications of adopting BDL to build dependable autonomous systems.
Quantifying and Using System Uncertainty in UAV Navigation
Jun 04, 2022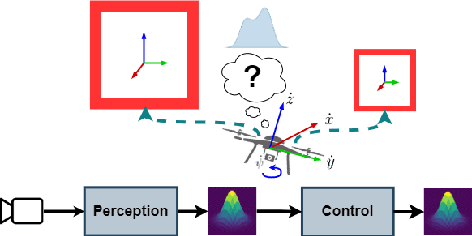
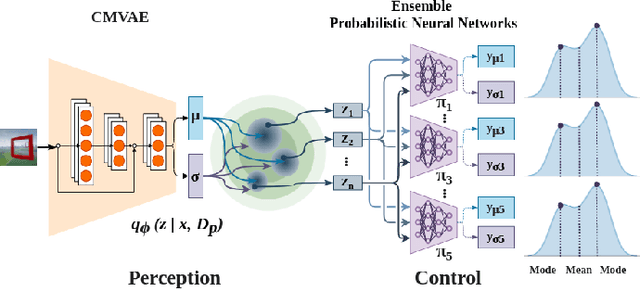
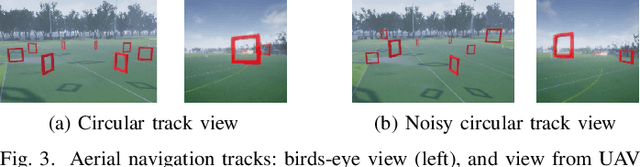
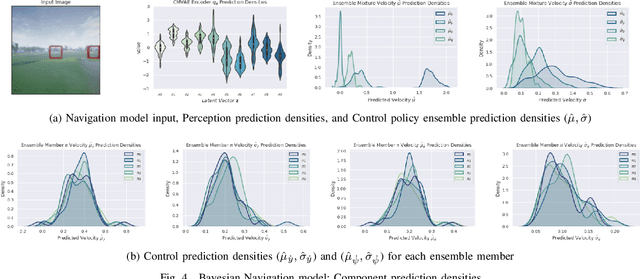
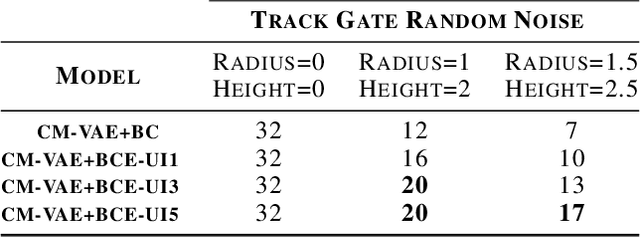
As autonomous systems increasingly rely on Deep Neural Networks (DNN) to implement the navigation pipeline functions, uncertainty estimation methods have become paramount for estimating confidence in DNN predictions. Bayesian Deep Learning (BDL) offers a principled approach to model uncertainties in DNNs. However, DNN components from autonomous systems partially capture uncertainty, or more importantly, the uncertainty effect in downstream tasks is ignored. This paper provides a method to capture the overall system uncertainty in a UAV navigation task. In particular, we study the effect of the uncertainty from perception representations in downstream control predictions. Moreover, we leverage the uncertainty in the system's output to improve control decisions that positively impact the UAV's performance on its task.
Improving Robustness of Deep Neural Networks for Aerial Navigation by Incorporating Input Uncertainty
Oct 29, 2021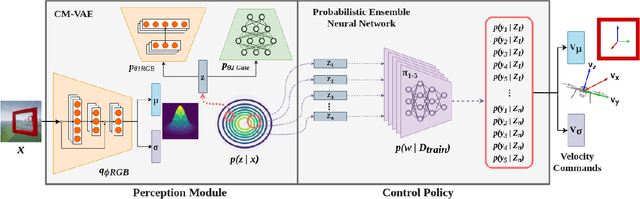
Uncertainty quantification methods are required in autonomous systems that include deep learning (DL) components to assess the confidence of their estimations. However, to successfully deploy DL components in safety-critical autonomous systems, they should also handle uncertainty at the input rather than only at the output of the DL components. Considering a probability distribution in the input enables the propagation of uncertainty through different components to provide a representative measure of the overall system uncertainty. In this position paper, we propose a method to account for uncertainty at the input of Bayesian Deep Learning control policies for Aerial Navigation. Our early experiments show that the proposed method improves the robustness of the navigation policy in Out-of-Distribution (OoD) scenarios.
A Comparison of Uncertainty Estimation Approaches in Deep Learning Components for Autonomous Vehicle Applications
Jul 02, 2020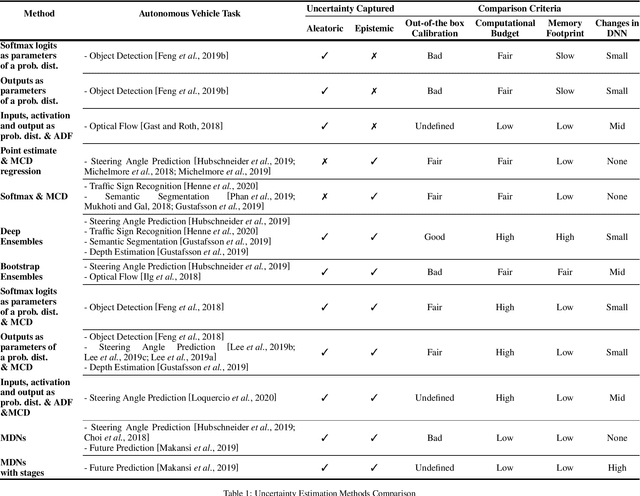
A key factor for ensuring safety in Autonomous Vehicles (AVs) is to avoid any abnormal behaviors under undesirable and unpredicted circumstances. As AVs increasingly rely on Deep Neural Networks (DNNs) to perform safety-critical tasks, different methods for uncertainty quantification have recently been proposed to measure the inevitable source of errors in data and models. However, uncertainty quantification in DNNs is still a challenging task. These methods require a higher computational load, a higher memory footprint, and introduce extra latency, which can be prohibitive in safety-critical applications. In this paper, we provide a brief and comparative survey of methods for uncertainty quantification in DNNs along with existing metrics to evaluate uncertainty predictions. We are particularly interested in understanding the advantages and downsides of each method for specific AV tasks and types of uncertainty sources.