 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Robotic Intrusion Prevention System: Combining Security and Safety in Cognitive Social Robots
Jul 09, 2024



Social Robots need to be safe and reliable to share their space with humans. This paper reports on the first results of a research project that aims to create more safe and reliable, intelligent autonomous robots by investigating the implications and interactions between cybersecurity and safety. We propose creating a robotic intrusion prevention system (RIPS) that follows a novel approach to detect and mitigate intrusions in cognitive social robot systems and other cyber-physical systems. The RIPS detects threats at the robotic communication level and enables mitigation of the cyber-physical threats by using System Modes to define what part of the robotic system reduces or limits its functionality while the system is compromised. We demonstrate the validity of our approach by applying it to a cognitive architecture running in a real social robot that preserves the privacy and safety of humans while facing several cyber attack situations.
A deep learning model for classification of diabetic retinopathy in eye fundus images based on retinal lesion detection
Oct 14, 2021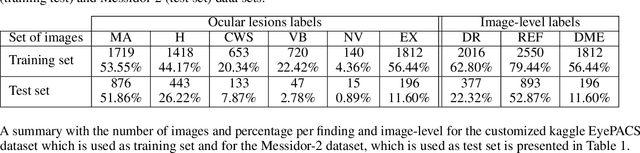
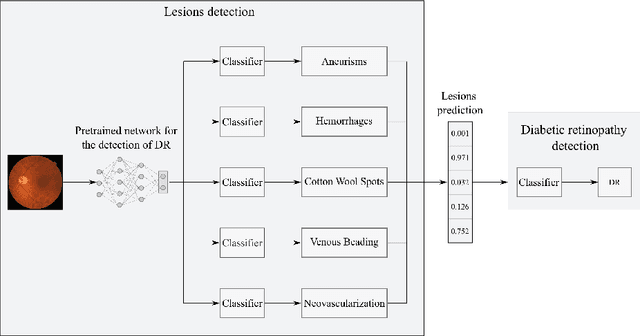
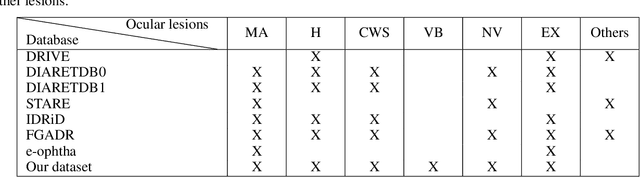
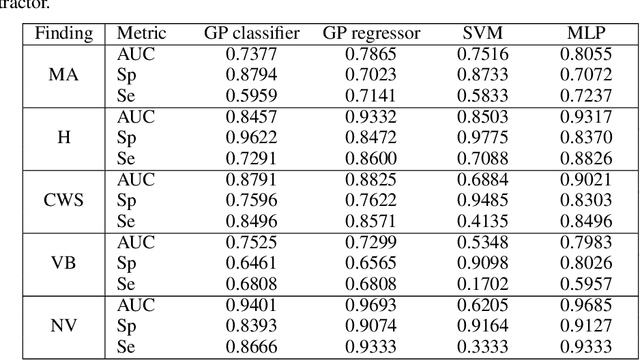
Diabetic retinopathy (DR) is the result of a complication of diabetes affecting the retina. It can cause blindness, if left undiagnosed and untreated. An ophthalmologist performs the diagnosis by screening each patient and analyzing the retinal lesions via ocular imaging. In practice, such analysis is time-consuming and cumbersome to perform. This paper presents a model for automatic DR classification on eye fundus images. The approach identifies the main ocular lesions related to DR and subsequently diagnoses the illness. The proposed method follows the same workflow as the clinicians, providing information that can be interpreted clinically to support the prediction. A subset of the kaggle EyePACS and the Messidor-2 datasets, labeled with ocular lesions, is made publicly available. The kaggle EyePACS subset is used as a training set and the Messidor-2 as a test set for lesions and DR classification models. For DR diagnosis, our model has an area-under-the-curve, sensitivity, and specificity of 0.948, 0.886, and 0.875, respectively, which competes with state-of-the-art approaches.
PlanSys2: A Planning System Framework for ROS2
Jul 01, 2021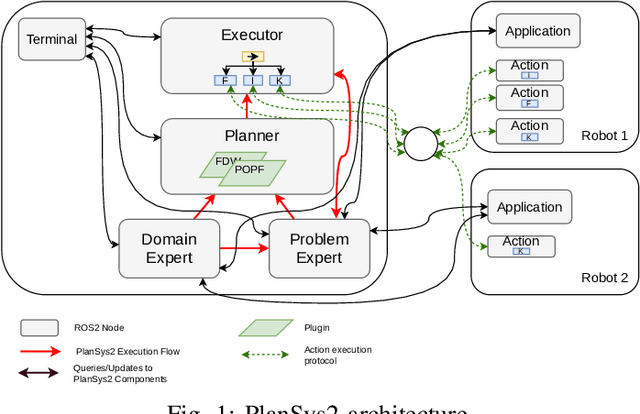
Autonomous robots need to plan the tasks they carry out to fulfill their missions. The missions' increasing complexity does not let human designers anticipate all the possible situations, so traditional control systems based on state machines are not enough. This paper contains a description of the ROS2 Planning System (PlanSys2 in short), a framework for symbolic planning that incorporates novel approaches for execution on robots working in demanding environments. PlanSys2 aims to be the reference task planning framework in ROS2, the latest version of the {\em de facto} standard in robotics software development. Among its main features, it can be highlighted the optimized execution, based on Behavior Trees, of plans through a new actions auction protocol and its multi-robot planning capabilities. It already has a small but growing community of users and developers, and this document is a summary of the design and capabilities of this project.