 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Heuristic Search Algorithms in Pathfinding: A Comprehensive Study on Performance Metrics and Domain Parameters
Oct 03, 2023The paper presents a comprehensive performance evaluation of some heuristic search algorithms in the context of autonomous systems and robotics. The objective of the study is to evaluate and compare the performance of different search algorithms in different problem settings on the pathfinding domain. Experiments give us insight into the behavior of the evaluated heuristic search algorithms, over the variation of different parameters: domain size, obstacle density, and distance between the start and the goal states. Results are then used to design a selection algorithm that, on the basis of problem characteristics, suggests the best search algorithm to use.
* In Proceedings AREA 2023, arXiv:2310.00333
Implementing BDI Continual Temporal Planning for Robotic Agents
Sep 01, 2023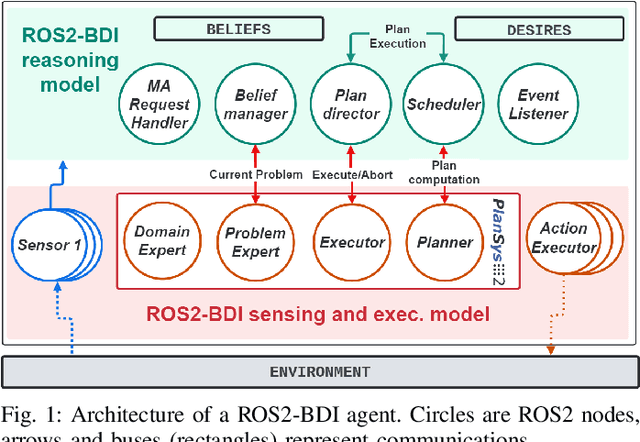
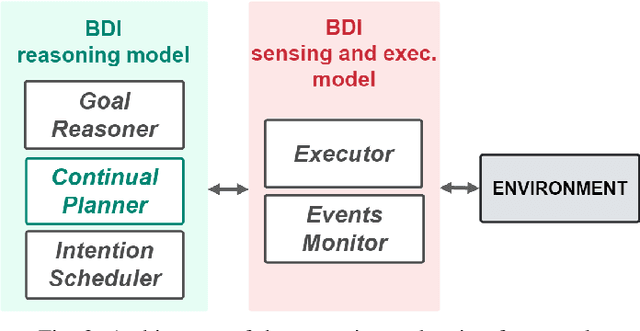
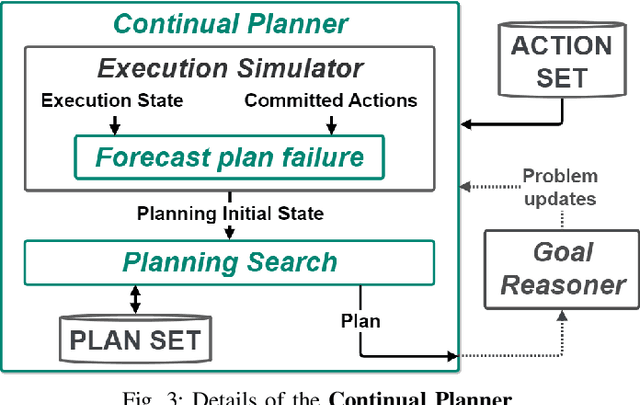
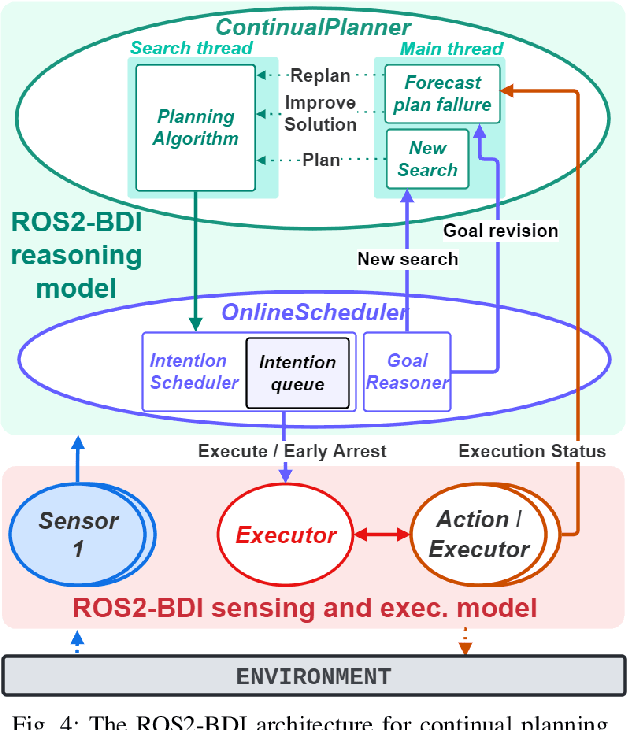
Making autonomous agents effective in real-life applications requires the ability to decide at run-time and a high degree of adaptability to unpredictable and uncontrollable events. Reacting to events is still a fundamental ability for an agent, but it has to be boosted up with proactive behaviors that allow the agent to explore alternatives and decide at run-time for optimal solutions. This calls for a continuous planning as part of the deliberation process that makes an agent able to reconsider plans on the base of temporal constraints and changes of the environment. Online planning literature offers several approaches used to select the next action on the base of a partial exploration of the solution space. In this paper, we propose a BDI continuous temporal planning framework, where interleave planning and execution loop is used to integrate online planning with the BDI control-loop. The framework has been implemented with the ROS2 robotic framework and planning algorithms offered by JavaFF.
Multi-Object Reasoning with Constrained Goal Models
Nov 25, 2016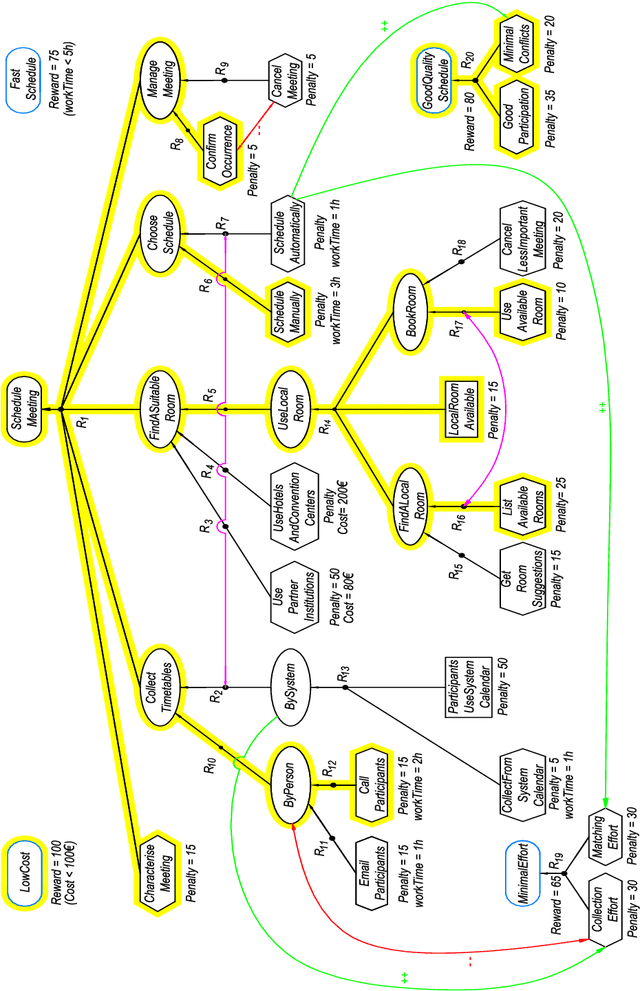
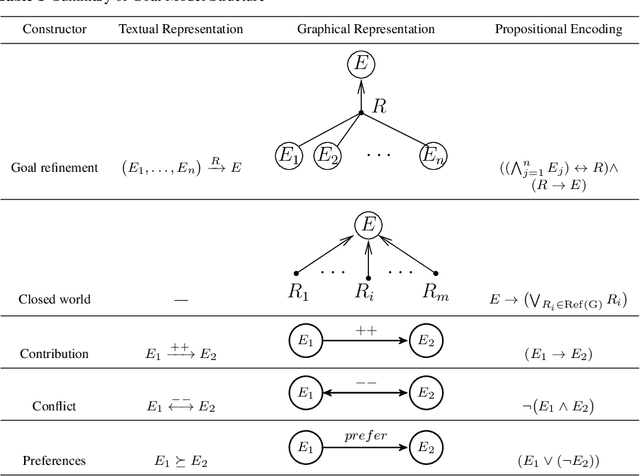
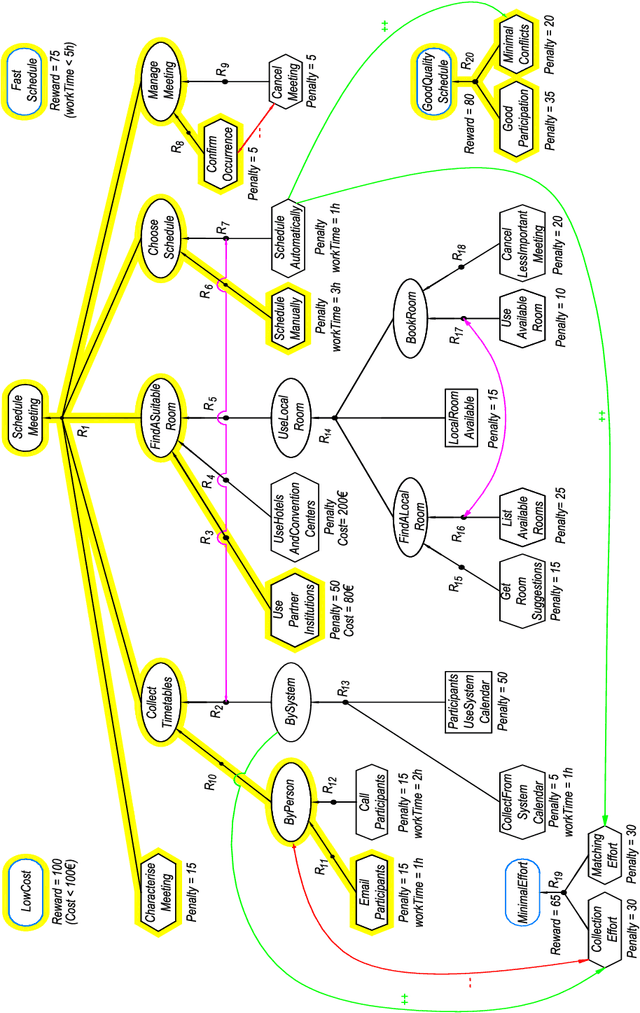
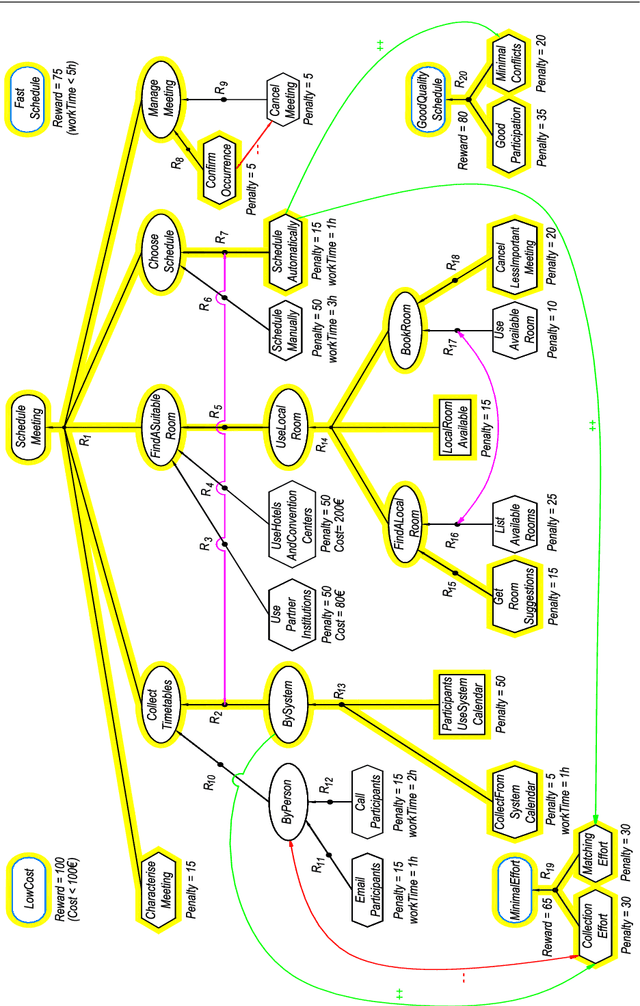
Goal models have been widely used in Computer Science to represent software requirements, business objectives, and design qualities. Existing goal modelling techniques, however, have shown limitations of expressiveness and/or tractability in coping with complex real-world problems. In this work, we exploit advances in automated reasoning technologies, notably Satisfiability and Optimization Modulo Theories (SMT/OMT), and we propose and formalize: (i) an extended modelling language for goals, namely the Constrained Goal Model (CGM), which makes explicit the notion of goal refinement and of domain assumption, allows for expressing preferences between goals and refinements, and allows for associating numerical attributes to goals and refinements for defining constraints and optimization goals over multiple objective functions, refinements and their numerical attributes; (ii) a novel set of automated reasoning functionalities over CGMs, allowing for automatically generating suitable refinements of input CGMs, under user-specified assumptions and constraints, that also maximize preferences and optimize given objective functions. We have implemented these modelling and reasoning functionalities in a tool, named CGM-Tool, using the OMT solver OptiMathSAT as automated reasoning backend. Moreover, we have conducted an experimental evaluation on large CGMs to support the claim that our proposal scales well for goal models with thousands of elements.