 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimization-Based Quadrupedal Hybrid Wheeled-Legged Locomotion
Jul 15, 2021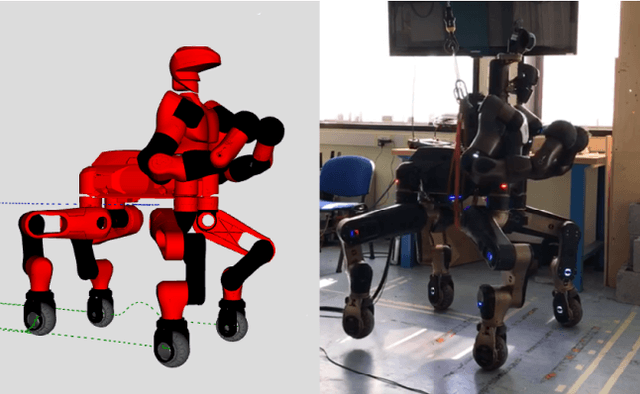
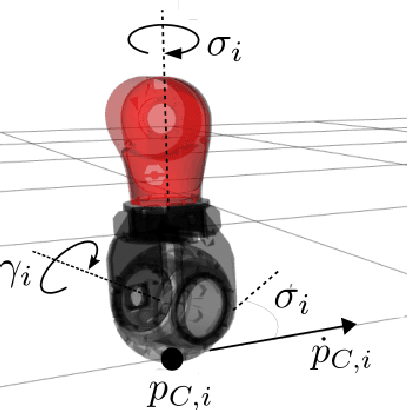
Hybrid wheeled-legged locomotion is a navigation paradigm only recently opened up by novel robotic designs,e.g. the centaur-type humanoid CENTAURO [1] or the quadruped ANYmal [2] in its configuration featuring non-steerable wheels. The term Hybrid Locomotion is hereafter used to indicate a particular type of locomotion, achieved with simultaneous and coordinate use of legs and wheels,see Fig. 1. Such choice stems at the intersection between legged locomotion and the simpler wheeled navigation, in order to get the best from both techniques: agility and ability to traverse uneven terrains from the first, speed and stability from the second. As a consequence, the problem of planning feasible trajectories for a hybrid robot shares many similarities with the legged locomotion problem: also in the hybrid case the motion of the base is reached through contact of the feet with the environment, taking into account that the wheeled feet can just push on the ground and not pull it. Forces compatible with friction cones have to be considered, while the contacts can slide just along the direction prescribed by the orientation of the wheels.
Agile Actions with a Centaur-Type Humanoid: A Decoupled Approach
Mar 12, 2021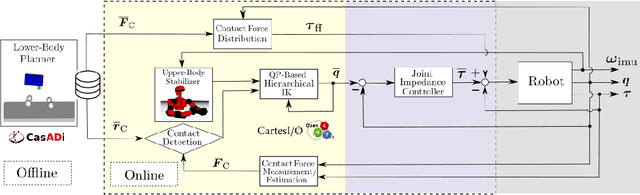
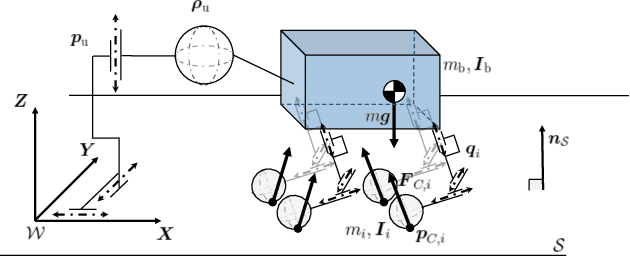
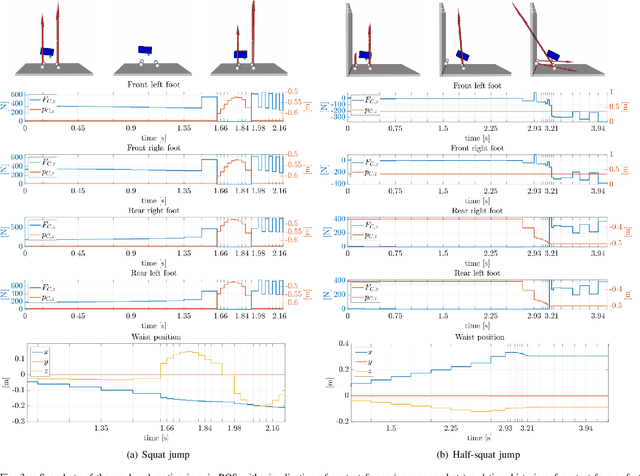
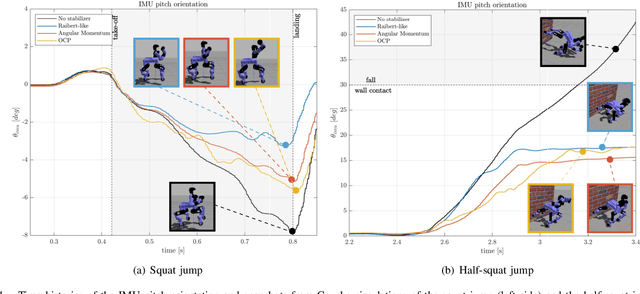
The kinematic features of a centaur-type humanoid platform, combined with a powerful actuation, enable the experimentation of a variety of agile and dynamic motions. However, the higher number of degrees-of-freedom and the increased weight of the system, compared to the bipedal and quadrupedal counterparts, pose significant research challenges in terms of computational load and real implementation. To this end, this work presents a control architecture to perform agile actions, conceived for torque-controlled platforms, which decouples for computational purposes offline optimal control planning of lower-body primitives, based on a template kinematic model, and online control of the upper-body motion to maintain balance. Three stabilizing strategies are presented, whose performance is compared in two types of simulated jumps, while experimental validation is performed on a half-squat jump using the CENTAURO robot.