 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Vocal Instructions to Household Tasks: The Inria Tiago++ in the euROBIN Service Robots Coopetition
Dec 20, 2024This paper describes the Inria team's integrated robotics system used in the 1st euROBIN coopetition, during which service robots performed voice-activated household tasks in a kitchen setting.The team developed a modified Tiago++ platform that leverages a whole-body control stack for autonomous and teleoperated modes, and an LLM-based pipeline for instruction understanding and task planning. The key contributions (opens-sourced) are the integration of these components and the design of custom teleoperation devices, addressing practical challenges in the deployment of service robots.
From the decoding of cortical activities to the control of a JACO robotic arm: a whole processing chain
Dec 01, 2012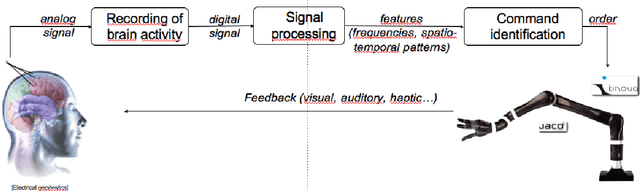
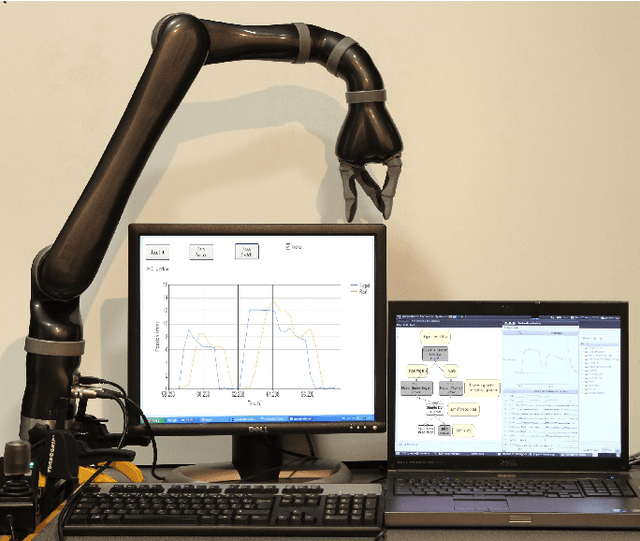
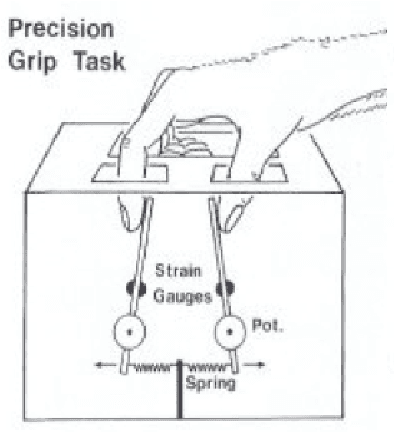
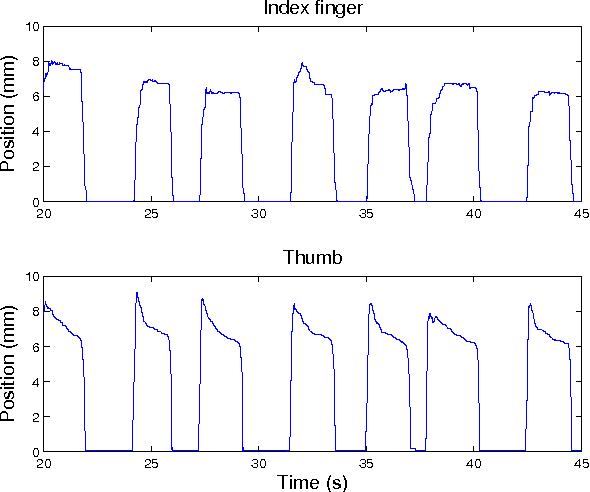
This paper presents a complete processing chain for decoding intracranial data recorded in the cortex of a monkey and replicates the associated movements on a JACO robotic arm by Kinova. We developed specific modules inside the OpenViBE platform in order to build a Brain-Machine Interface able to read the data, compute the position of the robotic finger and send this position to the robotic arm. More pre- cisely, two client/server protocols have been tested to transfer the finger positions: VRPN and a light protocol based on TCP/IP sockets. According to the requested finger position, the server calls the associ- ated functions of an API by Kinova to move the fin- gers properly. Finally, we monitor the gap between the requested and actual fingers positions. This chain can be generalized to any movement of the arm or wrist.
Introducing numerical bounds to improve event-based neural network simulation
Mar 20, 2009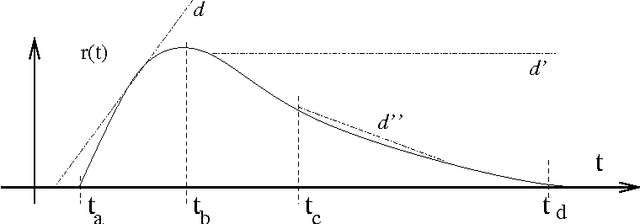
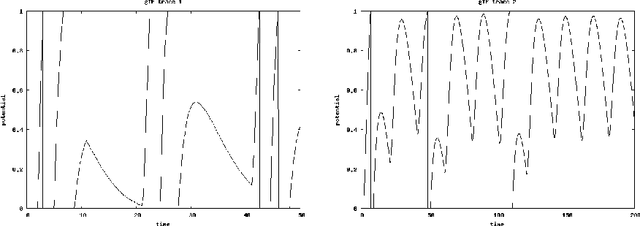
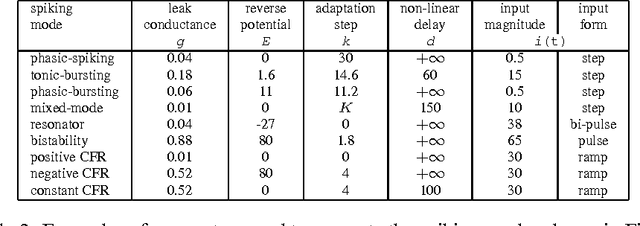
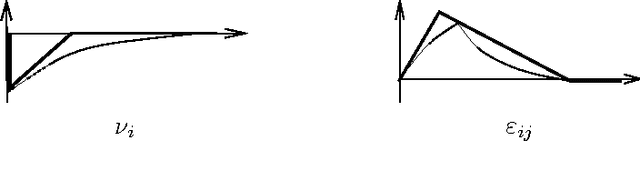
Although the spike-trains in neural networks are mainly constrained by the neural dynamics itself, global temporal constraints (refractoriness, time precision, propagation delays, ..) are also to be taken into account. These constraints are revisited in this paper in order to use them in event-based simulation paradigms. We first review these constraints, and discuss their consequences at the simulation level, showing how event-based simulation of time-constrained networks can be simplified in this context: the underlying data-structures are strongly simplified, while event-based and clock-based mechanisms can be easily mixed. These ideas are applied to punctual conductance-based generalized integrate-and-fire neural networks simulation, while spike-response model simulations are also revisited within this framework. As an outcome, a fast minimal complementary alternative with respect to existing simulation event-based methods, with the possibility to simulate interesting neuron models is implemented and experimented.