 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom the decoding of cortical activities to the control of a JACO robotic arm: a whole processing chain
Paper and Code
Dec 01, 2012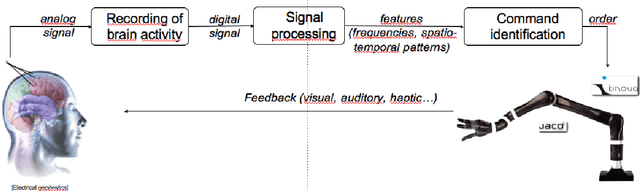
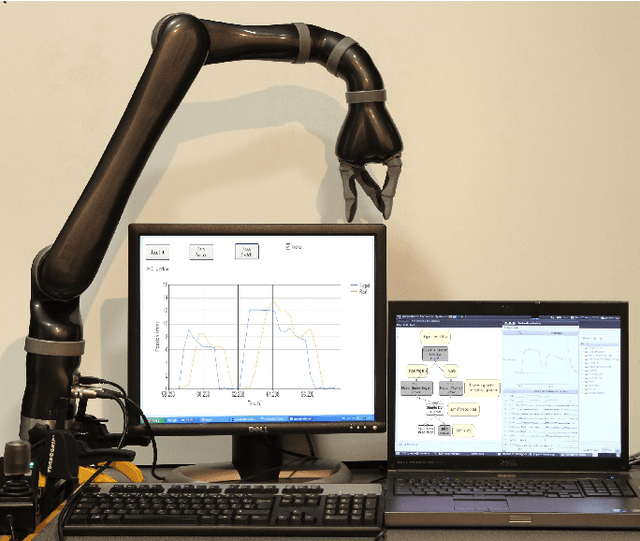
This paper presents a complete processing chain for decoding intracranial data recorded in the cortex of a monkey and replicates the associated movements on a JACO robotic arm by Kinova. We developed specific modules inside the OpenViBE platform in order to build a Brain-Machine Interface able to read the data, compute the position of the robotic finger and send this position to the robotic arm. More pre- cisely, two client/server protocols have been tested to transfer the finger positions: VRPN and a light protocol based on TCP/IP sockets. According to the requested finger position, the server calls the associ- ated functions of an API by Kinova to move the fin- gers properly. Finally, we monitor the gap between the requested and actual fingers positions. This chain can be generalized to any movement of the arm or wrist.