 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Bimanual Manipulation Using Optimal Motion Adaptation and Interaction Control
Paper and Code
Jun 01, 2022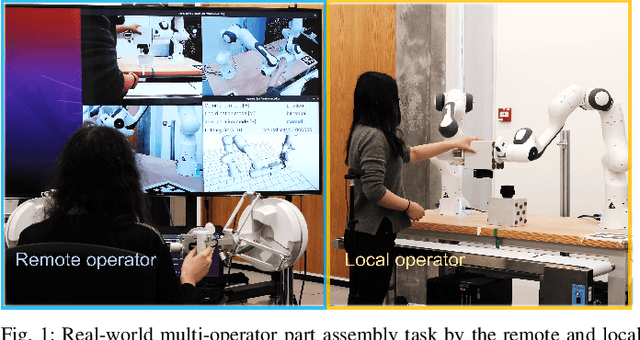
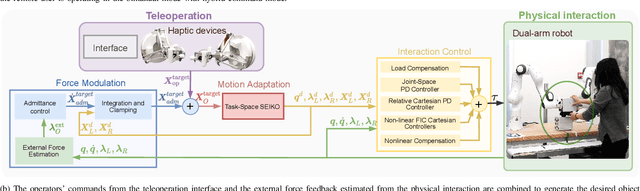
This work developed collaborative bimanual manipulation for reliable and safe human-robot collaboration, which allows remote and local human operators to work interactively for bimanual tasks. We proposed an optimal motion adaptation to retarget arbitrary commands from multiple human operators into feasible control references. The collaborative manipulation framework has three main modules: (1) contact force modulation for compliant physical interactions with objects via admittance control; (2) task-space sequential equilibrium and inverse kinematics optimization, which adapts interactive commands from multiple operators to feasible motions by satisfying the task constraints and physical limits of the robots; and (3) an interaction controller adopted from the fractal impedance control, which is robust to time delay and stable to superimpose multiple control efforts for generating desired joint torques and controlling the dual-arm robots. Extensive experiments demonstrated the capability of the collaborative bimanual framework, including (1) dual-arm teleoperation that adapts arbitrary infeasible commands that violate joint torque limits into continuous operations within safe boundaries, compared to failures without the proposed optimization; (2) robust maneuver of a stack of objects via physical interactions in presence of model inaccuracy; (3) collaborative multi-operator part assembly, and teleoperated industrial connector insertion, which validate the guaranteed stability of reliable human-robot co-manipulation.