 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust High-Transparency Haptic Exploration for Dexterous Telemanipulation
Paper and Code
Mar 03, 2020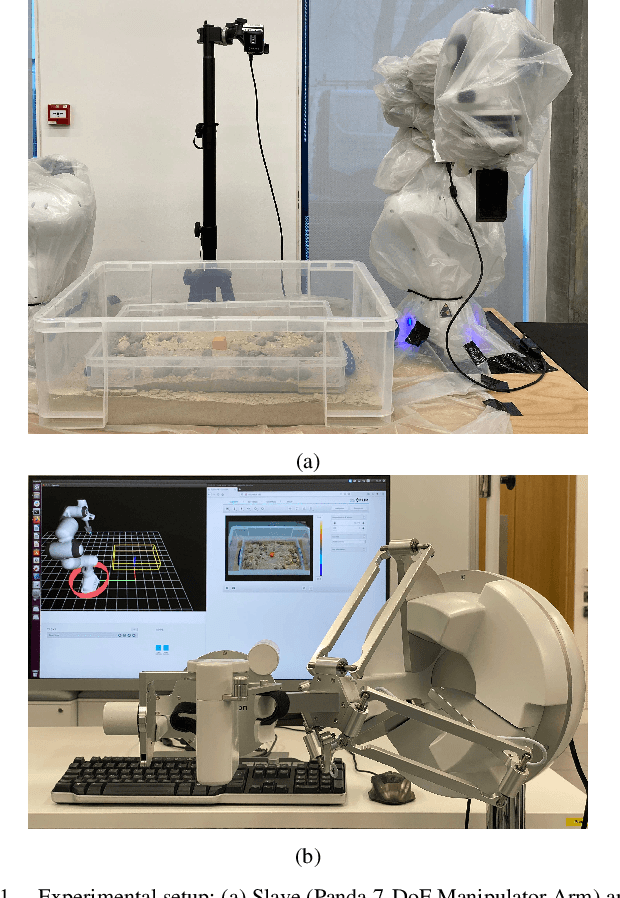

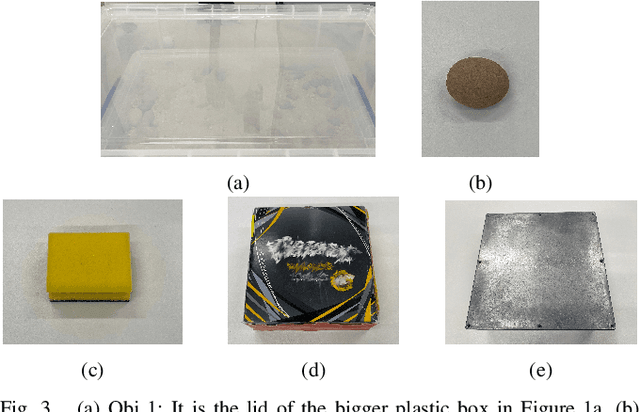
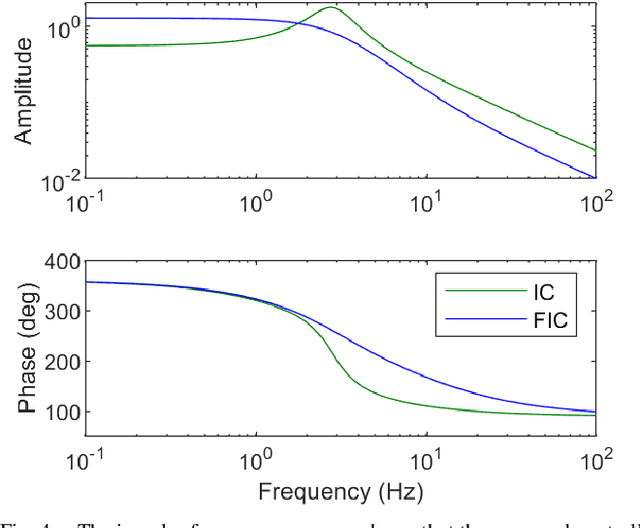
Robot teleoperation has been proposed as a solution to perform complex tasks in dangerous or remote environments. Teleoperation dexterity is not yet sufficient to enable effective interaction control, even in short-range operation, and low communication delays between the slave and the master. This manuscript explores the development of a haptic teleoperation setup that relies upon a recently proposed passive impedance controller, called Fractal Impedance Controller (FIC). The controller has a state-dependent impedance which enables to tune the slave task accuracy. The proposed controller has been compared with a similar setup using a traditional impedance controller. The results show that the proposed control architecture has higher transparency of interaction compared to the impedance controller. A preliminary study on the ability of an expert user to perform dexterous tasks has been conducted maintaining constant controller parameters. The tasks included opening an electrical box, driving a pile in the sand, pushing a ball on rough terrain, moving a sponge in an obstacle course, and pushing an E-stop button. The results show that the proposed method can complete all the task while the impedance controller on the slave could not. Furthermore, the FIC enables a shorter completion time on the tasks completed that have been also completed from the traditional impedance controller (pushing a ball, moving the sponge, and pushing E-Stop).