 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReasoningGuard: Safeguarding Large Reasoning Models with Inference-time Safety Aha Moments
Aug 06, 2025Large Reasoning Models (LRMs) have demonstrated impressive performance in reasoning-intensive tasks, but they remain vulnerable to harmful content generation, particularly in the mid-to-late steps of their reasoning processes. Existing defense mechanisms, however, rely on costly fine-tuning and additional expert knowledge, which restricts their scalability. In this work, we propose ReasoningGuard, an inference-time safeguard for LRMs, which injects timely safety aha moments to steer harmless while helpful reasoning processes. Leveraging the model's internal attention behavior, our approach accurately identifies critical points in the reasoning path, and triggers spontaneous, safety-oriented reflection. To safeguard both the subsequent reasoning steps and the final answers, we further implement a scaling sampling strategy during the decoding phase, selecting the optimal reasoning path. Inducing minimal extra inference cost, ReasoningGuard effectively mitigates three types of jailbreak attacks, including the latest ones targeting the reasoning process of LRMs. Our approach outperforms seven existing safeguards, achieving state-of-the-art safety defenses while effectively avoiding the common exaggerated safety issues.
One-Step Diffusion Model for Image Motion-Deblurring
Mar 09, 2025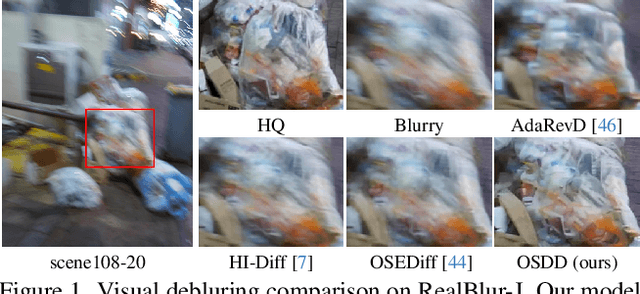
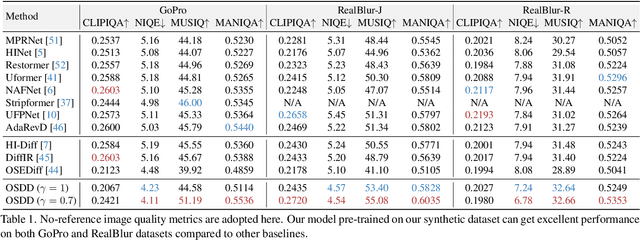

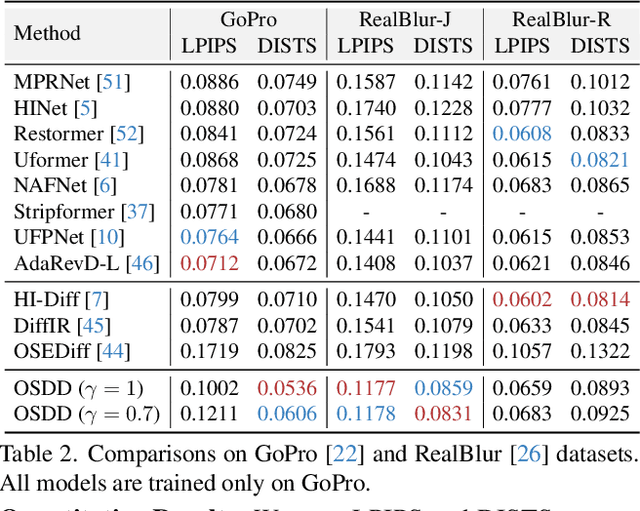
Currently, methods for single-image deblurring based on CNNs and transformers have demonstrated promising performance. However, these methods often suffer from perceptual limitations, poor generalization ability, and struggle with heavy or complex blur. While diffusion-based methods can partially address these shortcomings, their multi-step denoising process limits their practical usage. In this paper, we conduct an in-depth exploration of diffusion models in deblurring and propose a one-step diffusion model for deblurring (OSDD), a novel framework that reduces the denoising process to a single step, significantly improving inference efficiency while maintaining high fidelity. To tackle fidelity loss in diffusion models, we introduce an enhanced variational autoencoder (eVAE), which improves structural restoration. Additionally, we construct a high-quality synthetic deblurring dataset to mitigate perceptual collapse and design a dynamic dual-adapter (DDA) to enhance perceptual quality while preserving fidelity. Extensive experiments demonstrate that our method achieves strong performance on both full and no-reference metrics. Our code and pre-trained model will be publicly available at https://github.com/xyLiu339/OSDD.
Impact-Aware Multi-Contact Balance Criteria
Aug 13, 2023



Intentionally applying impacts while maintaining balance is challenging for legged robots. This study originated from observing experimental data of the humanoid robot HRP-4 intentionally hitting a wall with its right arm while standing on two feet. Strangely, violating the usual zero moment point balance criteria did not systematically result in a fall. To investigate this phenomenon, we propose the zero-step capture region for non-coplanar contacts, defined as the center of mass (CoM) velocity area, and validated it with push-recovery experiments employing the HRP-4 balancing on two non-coplanar contacts. To further enable on-purpose impacts, we compute the set of candidate post-impact CoM velocities accounting for frictional-impact dynamics in three dimensions, and restrict the entire set within the CoM velocity area to maintain balance with the sustained contacts during and after impacts. We illustrate the maximum contact velocity for various HRP-4 stances in simulation, indicating potential for integration into other task-space whole-body controllers or planners. This study is the first to address the challenging problem of applying an intentional impact with a kinematic-controlled humanoid robot on non-coplanar contacts.
A Manipulator-Assisted Multiple UAV Landing System for USV Subject to Disturbance
Dec 23, 2022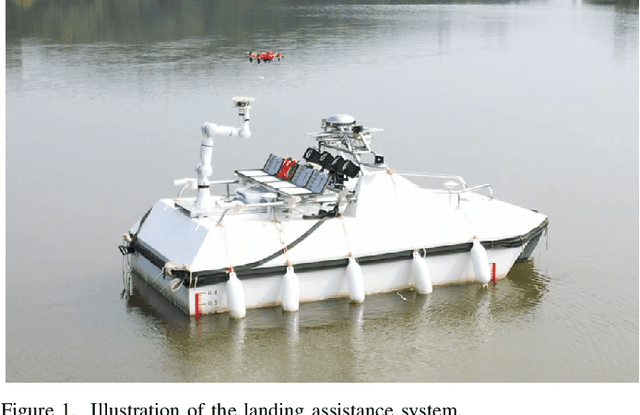
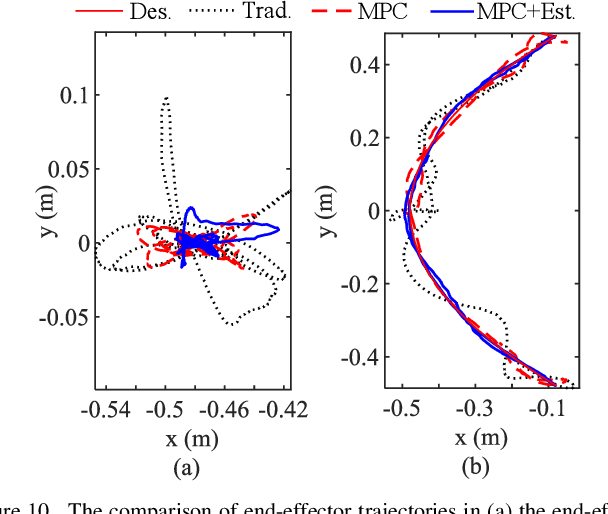
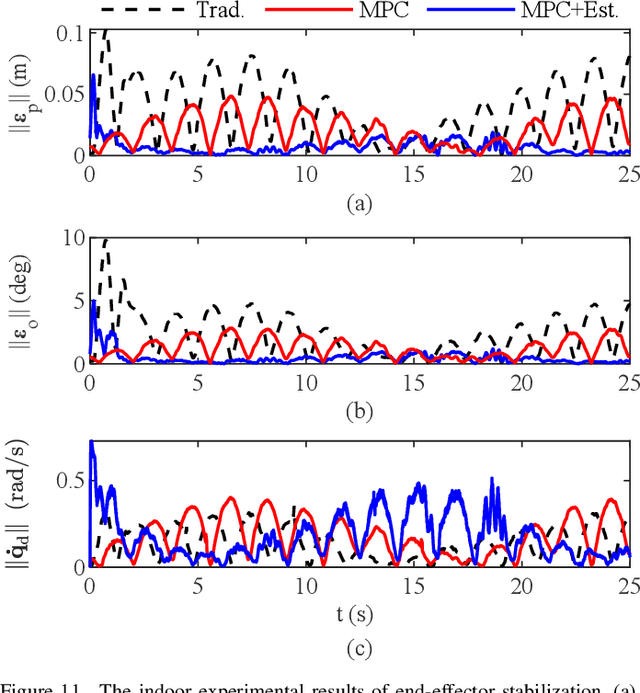
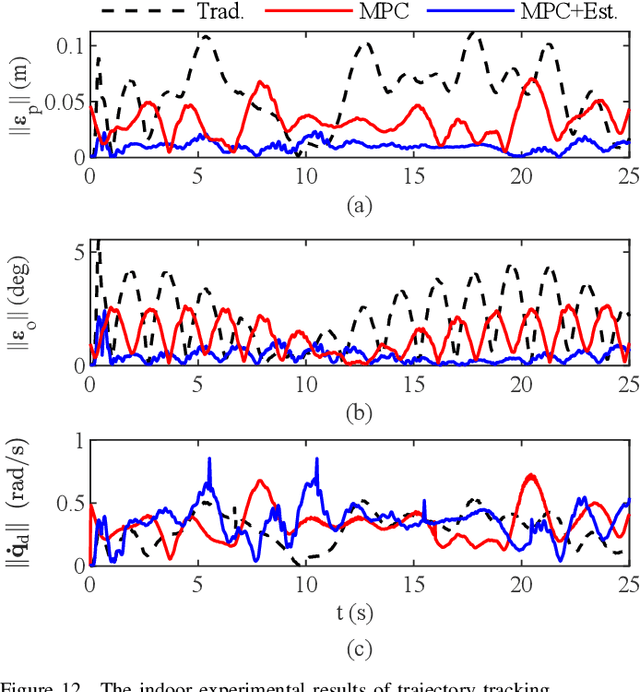
Marine waves significantly disturb the unmanned surface vehicle (USV) motion. An unmanned aerial vehicle (UAV) can hardly land on a USV that undergoes irregular motion. An oversized landing platform is usually necessary to guarantee the landing safety, which limits the number of UAVs that can be carried. We propose a landing system assisted by tether and robot manipulation. The system can land multiple UAVs without increasing the USV's size. An MPC controller stabilizes the end-effector and tracks the UAVs, and an adaptive estimator addresses the disturbance caused by the base motion. The working strategy of the system is designed to plan the motion of each device. We have validated the manipulator controller through simulations and well-controlled indoor experiments. During the field tests, the proposed system caught and placed the UAVs when the disturbed USV roll range was approximately 12 degrees.
Predicting Impact-Induced Joint Velocity Jumps on Kinematic-Controlled Manipulator
Feb 25, 2022
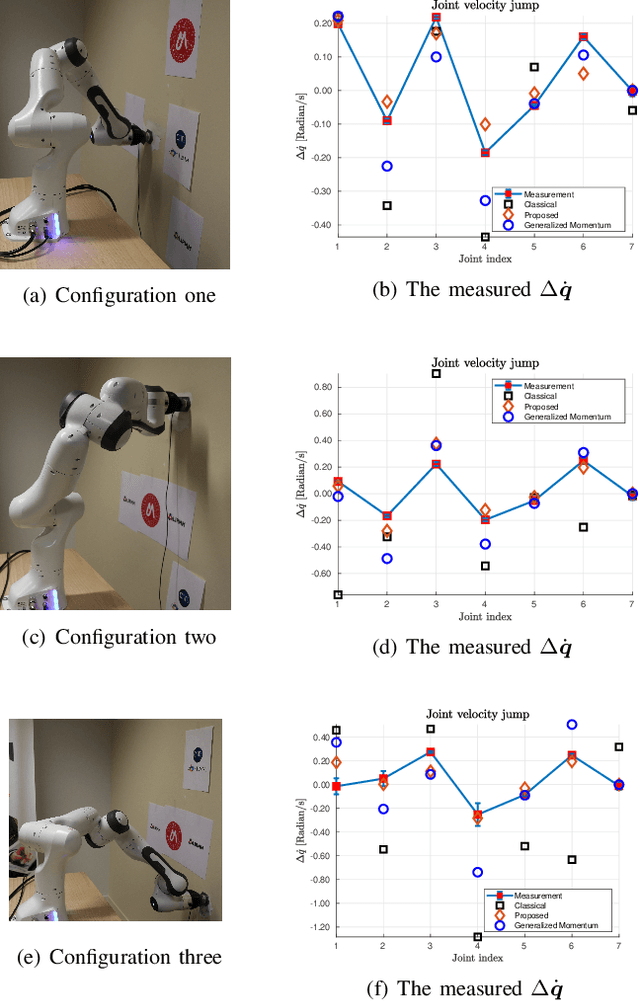
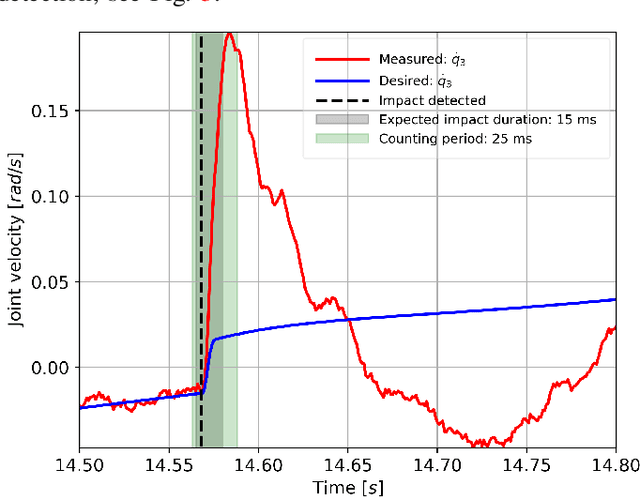

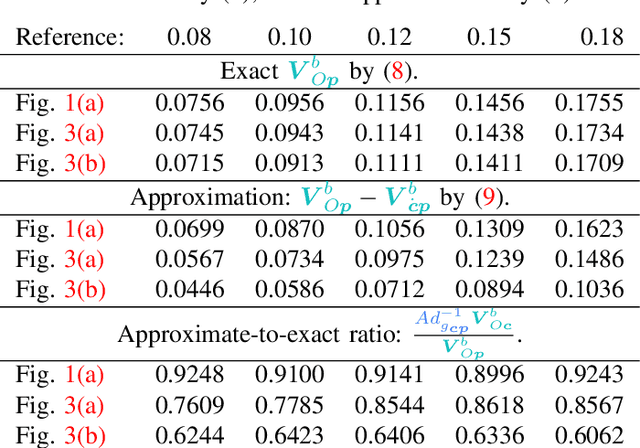
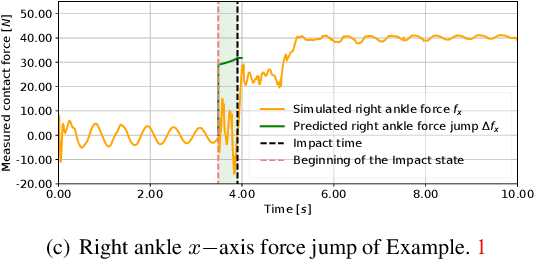
In order to enable on-purpose robotic impact tasks, predicting joint-velocity jumps is essential to enforce controller feasibility and hardware integrity. We observe a considerable prediction error of a commonly-used approach in robotics compared against 250 benchmark experiments with the Panda manipulator. We reduce the average prediction error by 81.98% as follows: First, we focus on task-space equations without inverting the ill-conditioned joint-space inertia matrix. Second, before the impact event, we compute the equivalent inertial properties of the end-effector tip considering that a high-gains (stiff) kinematic-controlled manipulator behaves like a composite-rigid body.
On Inverse Inertia Matrix and Contact-Force Model for Robotic Manipulators at Normal Impacts
Sep 10, 2021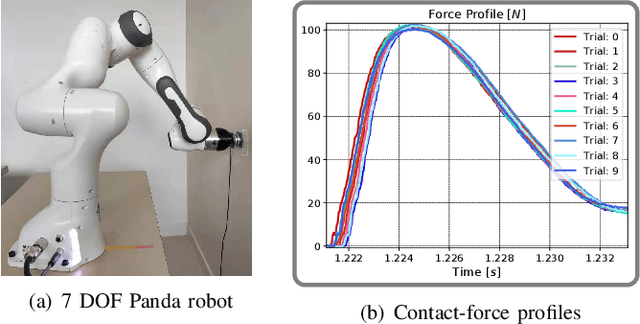

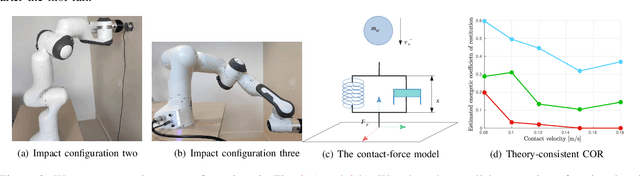
We revisit the impact with zero tangential contact velocities caused by an articulated robot arm contacting its rigid environment. The impact behavior depends on the fixed base and multiple rigid links connected by motorized joints. Our thorough analysis focuses on deriving the suitable inverse inertia matrix and a realistic contact-force model. We conducted real-robot experiments with the 7 DOF Panda manipulator, collecting data of 150 impacts with varying joint configurations and different end-effector speeds. Our findings suggest computing the inverse inertia matrix assuming the joints are locked, i.e., transform the composite-rigid-body inertia at the contact point, and the measurement-consistent contact-force model is viscoelastic.
Impact-Aware Task-Space Quadratic-Programming Control
Jun 03, 2020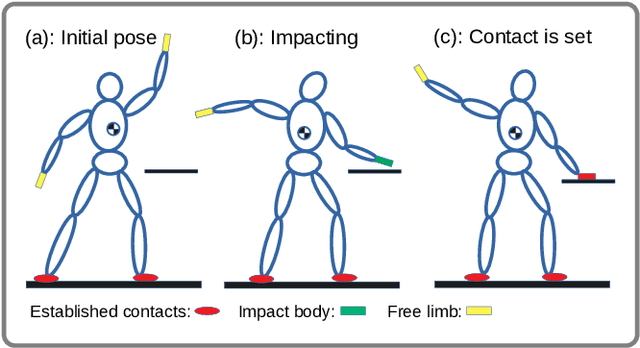
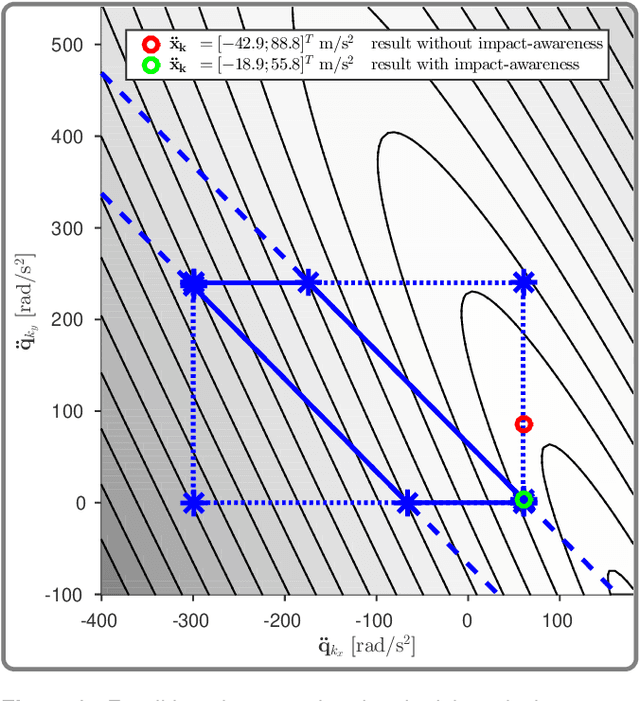
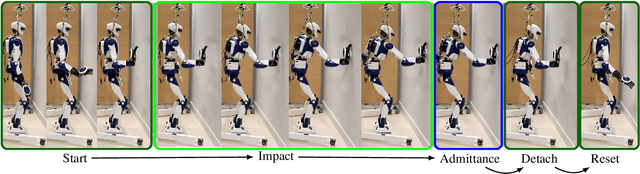
Generating on-purpose impacts with rigid robots is challenging as they may lead to severe hardware failures due to abrupt changes in the velocities and torques. Without dedicated hardware and controllers, robots typically operate at a near-zero velocity in the vicinity of contacts. We assume knowing how much of impact the hardware can absorb and focus solely on the controller aspects. Hybrid controllers with reset maps provided elegant solutions for given impact tasks. The novelty of our approach is twofold: (i) it uses the task-space inverse dynamics formalism that we extend by seamlessly integrating impact tasks; (ii) it does not require separate models with switches or a reset map to operate the robot undergoing impact tasks. Our main idea lies in integrating post-impact states prediction and impact-aware inequality constraints as part of our existing general-purpose whole-body controller. To achieve such prediction, we formulate task-space impacts and its spreading along the kinematic and potentially arborescent, structure of a floating-base robot with subsequent joint velocity and torque jumps. As a result, the feasible solution set accounts for various constraints due to expected impacts. In a multi-contact situation of under-actuated legged robots subject to multiple impacts, we also enforce the dynamic equilibrium margins. By design, our controller does not require precise knowledge of impact location and timing. We assessed our formalism with the humanoid robot HRP-4, generating maximum contact velocities, neither breaking established contacts nor damaging the hardware.
Impact-aware humanoid robot motion generation with a quadratic optimization controller
Jan 23, 2020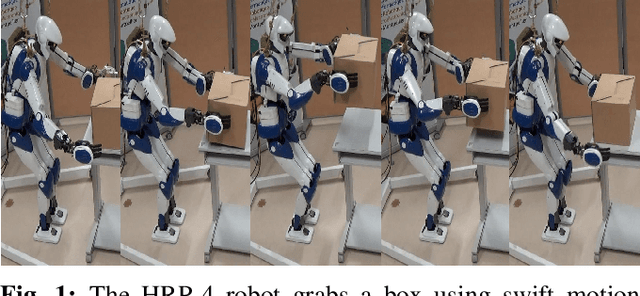

Impact-aware tasks (i.e. on purpose impacts) are not handled in multi-objective whole body controllers of hu-manoid robots. This leads to the fact that a humanoid robot typically operates at near-zero velocity to interact with the external environment. We explicitly investigate the propagation of the impact-induced velocity and torque jumps along the structure linkage and propose a set of constraints that always satisfy the hardware limits, sustain already established contacts and the stability measure, i.e. the zero moment point condition. Without assumptions on the impact location or timing, our proposed controller enables humanoid robots to generate non-zero contact velocity without breaking the established contacts or falling. The novelty of our approach lies in building on existing continuous dynamics whole body multi-objective controller without the need of reset-maps or hybrid control.