 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Matching to Tiles: Bridging Unaligned Aerial and Satellite Views for Vision-Only UAV Navigation
Mar 23, 2026Recent advances in cross-view geo-localization (CVGL) methods have shown strong potential for supporting unmanned aerial vehicle (UAV) navigation in GNSS-denied environments. However, existing work predominantly focuses on matching UAV views to onboard map tiles, which introduces an inherent trade-off between accuracy and storage overhead, and overlooks the importance of the UAV's heading during navigation. Moreover, the substantial discrepancies and varying overlaps in cross-view scenarios have been insufficiently considered, limiting their generalization to real-world scenarios. In this paper, we present Bearing-UAV, a purely vision-driven cross-view navigation method that jointly predicts UAV absolute location and heading from neighboring features, enabling accurate, lightweight, and robust navigation in the wild. Our method leverages global and local structural features and explicitly encodes relative spatial relationships, making it robust to cross-view variations, misalignment, and feature-sparse conditions. We also present Bearing-UAV-90k, a multi-city benchmark for evaluating cross-view localization and navigation. Extensive experiments show encouraging results that Bearing-UAV yields lower localization error than previous matching/retrieval paradigm across diverse terrains. Our code and dataset will be made publicly available.
MoXaRt: Audio-Visual Object-Guided Sound Interaction for XR
Mar 11, 2026In Extended Reality (XR), complex acoustic environments often overwhelm users, compromising both scene awareness and social engagement due to entangled sound sources. We introduce MoXaRt, a real-time XR system that uses audio-visual cues to separate these sources and enable fine-grained sound interaction. MoXaRt's core is a cascaded architecture that performs coarse, audio-only separation in parallel with visual detection of sources (e.g., faces, instruments). These visual anchors then guide refinement networks to isolate individual sources, separating complex mixes of up to 5 concurrent sources (e.g., 2 voices + 3 instruments) with ~2 second processing latency. We validate MoXaRt through a technical evaluation on a new dataset of 30 one-minute recordings featuring concurrent speech and music, and a 22-participant user study. Empirical results indicate that our system significantly enhances speech intelligibility, yielding a 36.2% (p < 0.01) increase in listening comprehension within adversarial acoustic environments while substantially reducing cognitive load (p < 0.001), thereby paving the way for more perceptive and socially adept XR experiences.
Robot-Assisted Drone Recovery on a Wavy Surface Using Error-State Kalman Filter and Receding Horizon Model Predictive Control
May 14, 2025Recovering a drone on a disturbed water surface remains a significant challenge in maritime robotics. In this paper, we propose a unified framework for Robot-Assisted Drone Recovery on a Wavy Surface that addresses two major tasks: Firstly, accurate prediction of a moving drone's position under wave-induced disturbances using an Error-State Kalman Filter (ESKF), and secondly, effective motion planning for a manipulator via Receding Horizon Control (RHC). Specifically, the ESKF predicts the drone's future position 0.5s ahead, while the manipulator plans a capture trajectory in real time, thus overcoming not only wave-induced base motions but also limited torque constraints. We provide a system design that comprises a manipulator subsystem and a UAV subsystem. On the UAV side, we detail how position control and suspended payload strategies are implemented. On the manipulator side, we show how an RHC scheme outperforms traditional low-level control algorithms. Simulation and real-world experiments - using wave-disturbed motion data - demonstrate that our approach achieves a high success rate - above 95% and outperforms conventional baseline methods by up to 10% in efficiency and 20% in precision. The results underscore the feasibility and robustness of our system, which achieves state-of-the-art (SOTA) performance and offers a practical solution for maritime drone operations.
SCKD: Semi-Supervised Cross-Modality Knowledge Distillation for 4D Radar Object Detection
Dec 19, 20243D object detection is one of the fundamental perception tasks for autonomous vehicles. Fulfilling such a task with a 4D millimeter-wave radar is very attractive since the sensor is able to acquire 3D point clouds similar to Lidar while maintaining robust measurements under adverse weather. However, due to the high sparsity and noise associated with the radar point clouds, the performance of the existing methods is still much lower than expected. In this paper, we propose a novel Semi-supervised Cross-modality Knowledge Distillation (SCKD) method for 4D radar-based 3D object detection. It characterizes the capability of learning the feature from a Lidar-radar-fused teacher network with semi-supervised distillation. We first propose an adaptive fusion module in the teacher network to boost its performance. Then, two feature distillation modules are designed to facilitate the cross-modality knowledge transfer. Finally, a semi-supervised output distillation is proposed to increase the effectiveness and flexibility of the distillation framework. With the same network structure, our radar-only student trained by SCKD boosts the mAP by 10.38% over the baseline and outperforms the state-of-the-art works on the VoD dataset. The experiment on ZJUODset also shows 5.12% mAP improvements on the moderate difficulty level over the baseline when extra unlabeled data are available. Code is available at https://github.com/Ruoyu-Xu/SCKD.
A Manipulator-Assisted Multiple UAV Landing System for USV Subject to Disturbance
Dec 23, 2022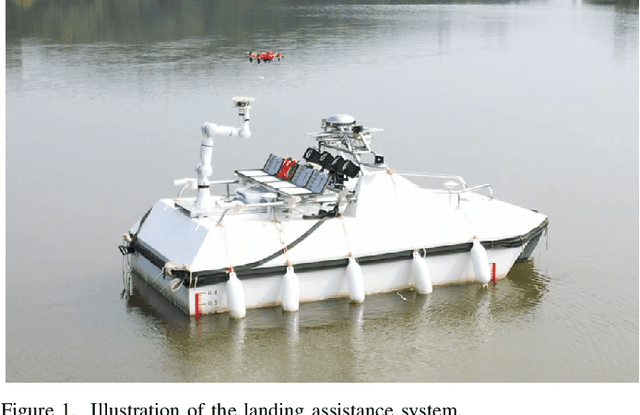
Marine waves significantly disturb the unmanned surface vehicle (USV) motion. An unmanned aerial vehicle (UAV) can hardly land on a USV that undergoes irregular motion. An oversized landing platform is usually necessary to guarantee the landing safety, which limits the number of UAVs that can be carried. We propose a landing system assisted by tether and robot manipulation. The system can land multiple UAVs without increasing the USV's size. An MPC controller stabilizes the end-effector and tracks the UAVs, and an adaptive estimator addresses the disturbance caused by the base motion. The working strategy of the system is designed to plan the motion of each device. We have validated the manipulator controller through simulations and well-controlled indoor experiments. During the field tests, the proposed system caught and placed the UAVs when the disturbed USV roll range was approximately 12 degrees.