 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParallel Self-assembly for a Multi-USV System on Water Surface with Obstacles
Jun 30, 2023


Parallel self-assembly is an efficient approach to accelerate the assembly process for modular robots. However, these approaches cannot accommodate complicated environments with obstacles, which restricts their applications. This paper considers the surrounding stationary obstacles and proposes a parallel self-assembly planning algorithm named SAPOA. With this algorithm, modular robots can avoid immovable obstacles when performing docking actions, which adapts the parallel self-assembly process to complex scenes. To validate the efficiency and scalability, we have designed 25 distinct grid maps with different obstacle configurations to simulate the algorithm. From the results compared to the existing parallel self-assembly algorithms, our algorithm shows a significantly higher success rate, which is more than 80%. For verification in real-world applications, a multi-agent hardware testbed system is developed. The algorithm is successfully deployed on four omnidirectional unmanned surface vehicles, CuBoats. The navigation strategy that translates the discrete planner, SAPOA, to the continuous controller on the CuBoats is presented. The algorithm's feasibility and flexibility were demonstrated through successful self-assembly experiments on 5 maps with varying obstacle configurations.
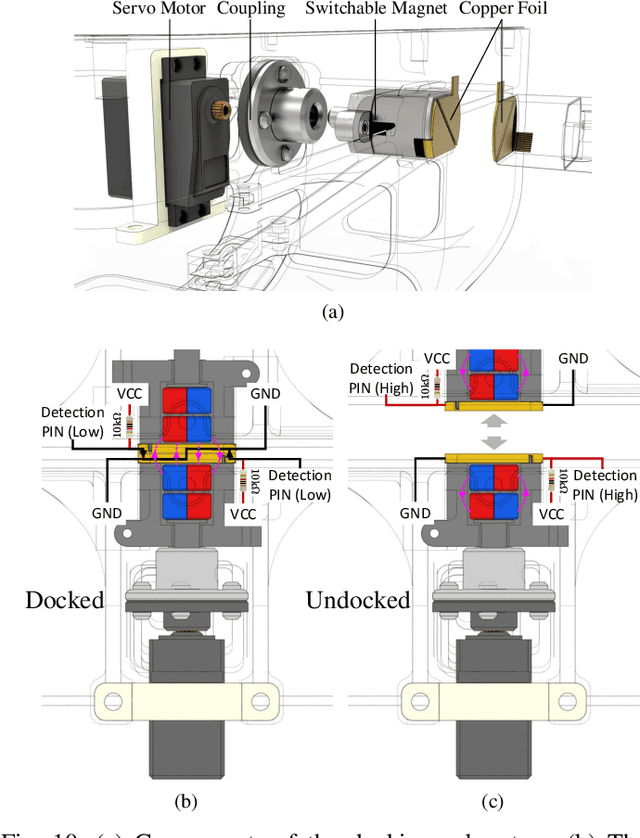
A Manipulator-Assisted Multiple UAV Landing System for USV Subject to Disturbance
Dec 23, 2022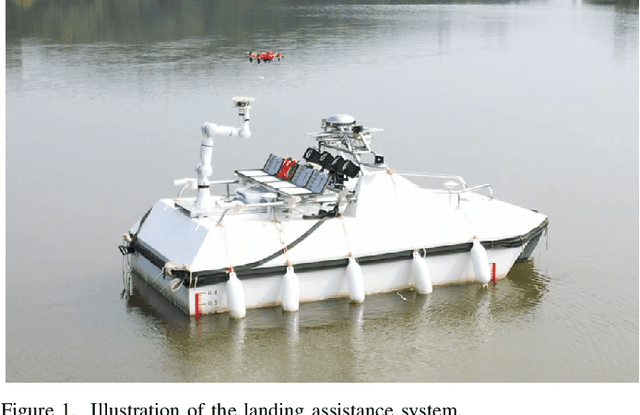
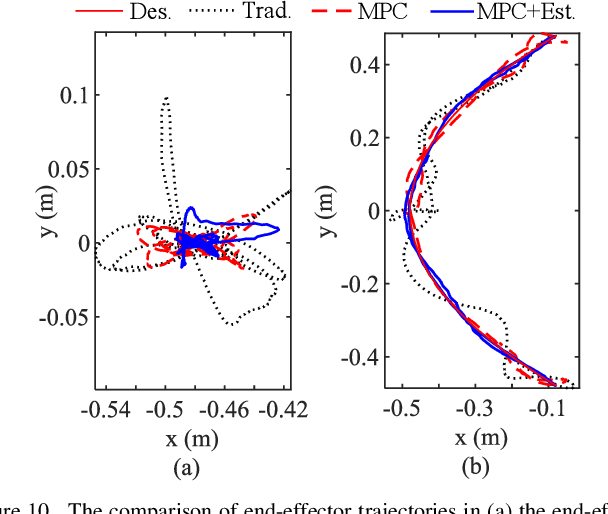
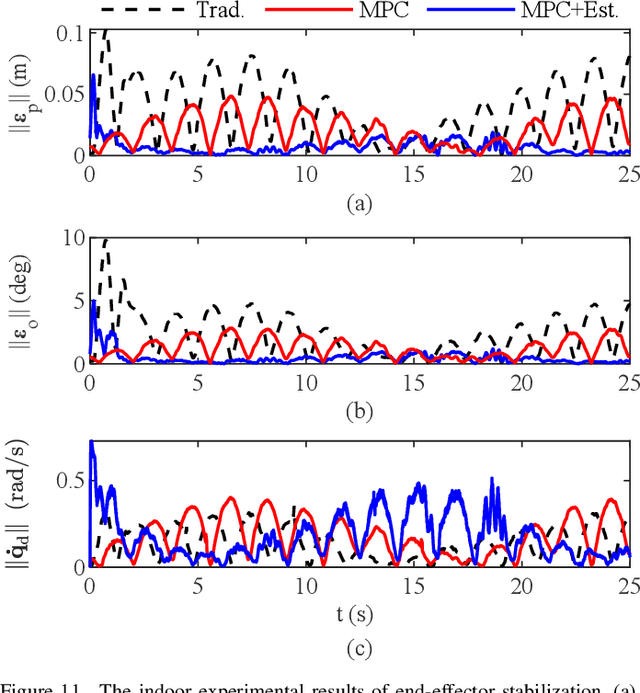
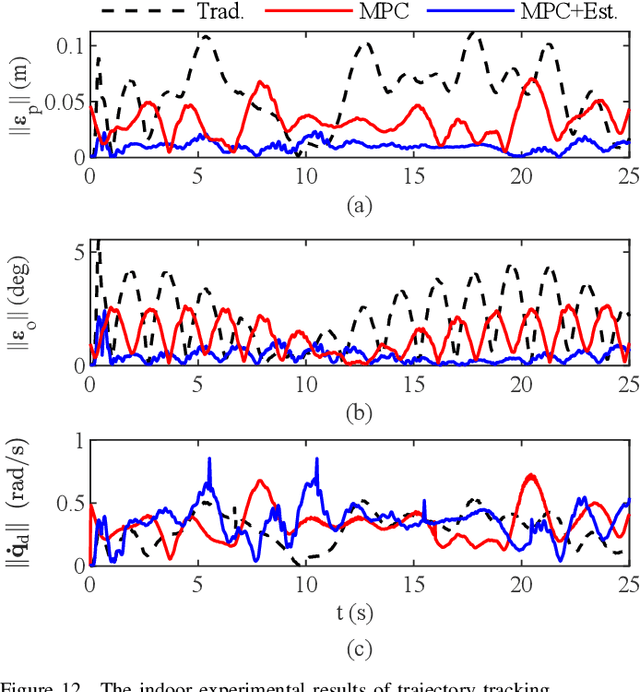
Marine waves significantly disturb the unmanned surface vehicle (USV) motion. An unmanned aerial vehicle (UAV) can hardly land on a USV that undergoes irregular motion. An oversized landing platform is usually necessary to guarantee the landing safety, which limits the number of UAVs that can be carried. We propose a landing system assisted by tether and robot manipulation. The system can land multiple UAVs without increasing the USV's size. An MPC controller stabilizes the end-effector and tracks the UAVs, and an adaptive estimator addresses the disturbance caused by the base motion. The working strategy of the system is designed to plan the motion of each device. We have validated the manipulator controller through simulations and well-controlled indoor experiments. During the field tests, the proposed system caught and placed the UAVs when the disturbed USV roll range was approximately 12 degrees.