 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneral Self-Prediction Enhancement for Spiking Neurons
Jan 29, 2026Spiking Neural Networks (SNNs) are highly energy-efficient due to event-driven, sparse computation, but their training is challenged by spike non-differentiability and trade-offs among performance, efficiency, and biological plausibility. Crucially, mainstream SNNs ignore predictive coding, a core cortical mechanism where the brain predicts inputs and encodes errors for efficient perception. Inspired by this, we propose a self-prediction enhanced spiking neuron method that generates an internal prediction current from its input-output history to modulate membrane potential. This design offers dual advantages, it creates a continuous gradient path that alleviates vanishing gradients and boosts training stability and accuracy, while also aligning with biological principles, which resembles distal dendritic modulation and error-driven synaptic plasticity. Experiments show consistent performance gains across diverse architectures, neuron types, time steps, and tasks demonstrating broad applicability for enhancing SNNs.
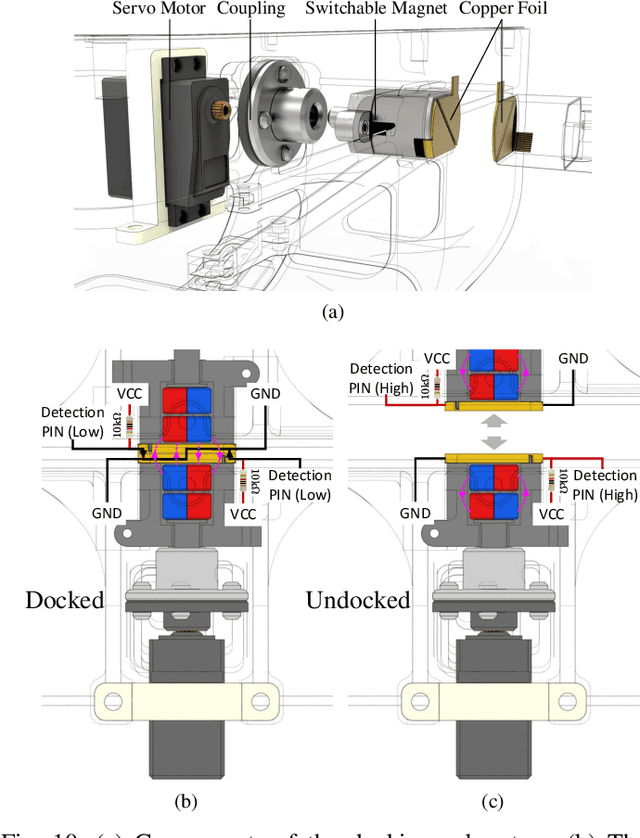
Parallel Self-assembly for Modular USVs with Diverse Docking Mechanism Layouts
Jan 27, 2024



Self-assembly enables multi-robot systems to merge diverse capabilities and accomplish tasks beyond the reach of individual robots. Incorporating varied docking mechanisms layouts (DMLs) can enhance robot versatility or reduce costs. However, assembling multiple heterogeneous robots with diverse DMLs is still a research gap. This paper addresses this problem by introducing CuBoat, an omnidirectional unmanned surface vehicle (USV). CuBoat can be equipped with or without docking systems on its four sides to emulate heterogeneous robots. We implement a multi-robot system based on multiple CuBoats. To enhance maneuverability, a linear active disturbance rejection control (LADRC) scheme is proposed. Additionally, we present a generalized parallel self-assembly planning algorithm for efficient assembly among CuBoats with different DMLs. Validation is conducted through simulation within 2 scenarios across 4 distinct maps, demonstrating the performance of the self-assembly planning algorithm. Moreover, trajectory tracking tests confirm the effectiveness of the LADRC controller. Self-assembly experiments on 5 maps with different target structures affirm the algorithm's feasibility and generality. This study advances robotic self-assembly, enabling multi-robot systems to collaboratively tackle complex tasks beyond the capabilities of individual robots.
Parallel Self-assembly for a Multi-USV System on Water Surface with Obstacles
Jun 30, 2023


Parallel self-assembly is an efficient approach to accelerate the assembly process for modular robots. However, these approaches cannot accommodate complicated environments with obstacles, which restricts their applications. This paper considers the surrounding stationary obstacles and proposes a parallel self-assembly planning algorithm named SAPOA. With this algorithm, modular robots can avoid immovable obstacles when performing docking actions, which adapts the parallel self-assembly process to complex scenes. To validate the efficiency and scalability, we have designed 25 distinct grid maps with different obstacle configurations to simulate the algorithm. From the results compared to the existing parallel self-assembly algorithms, our algorithm shows a significantly higher success rate, which is more than 80%. For verification in real-world applications, a multi-agent hardware testbed system is developed. The algorithm is successfully deployed on four omnidirectional unmanned surface vehicles, CuBoats. The navigation strategy that translates the discrete planner, SAPOA, to the continuous controller on the CuBoats is presented. The algorithm's feasibility and flexibility were demonstrated through successful self-assembly experiments on 5 maps with varying obstacle configurations.
Design and Control of the "TransBoat": A Transformable Unmanned Surface Vehicle for Overwater Construction
Dec 07, 2022



This paper presents the TransBoat, a novel omnidirectional unmanned surface vehicle (USV) with a magnetbased docking system for overwater construction with wave disturbances. This is the first such USV that can build overwater structures by transporting modules. The TransBoat incorporates two features designed to reject wave disturbances. First, the TransBoat's expandable body structure can actively transform from a mono-hull into a multi-hull for stabilization in turbulent environments by extending its four outrigger hulls. Second, a real-time nonlinear model predictive control (NMPC) scheme is proposed for all shapes of the TransBoat to enhance its maneuverability and resist disturbance to its movement, based on a nonlinear dynamic model. An experimental approach is proposed to identify the parameters of the dynamic model, and a subsequent trajectory tracking test validates the dynamics, NMPC controller and system mobility. Further, docking experiments identify improved performance in the expanded form of the TransBoat compared with the contracted form, including an increased success rate (of ~ 10%) and reduced docking time (of ~ 40 s on average). Finally, a bridge construction test verifies our system design and the NMPC control method.