 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParallel Self-assembly for Modular USVs with Diverse Docking Mechanism Layouts
Jan 27, 2024



Self-assembly enables multi-robot systems to merge diverse capabilities and accomplish tasks beyond the reach of individual robots. Incorporating varied docking mechanisms layouts (DMLs) can enhance robot versatility or reduce costs. However, assembling multiple heterogeneous robots with diverse DMLs is still a research gap. This paper addresses this problem by introducing CuBoat, an omnidirectional unmanned surface vehicle (USV). CuBoat can be equipped with or without docking systems on its four sides to emulate heterogeneous robots. We implement a multi-robot system based on multiple CuBoats. To enhance maneuverability, a linear active disturbance rejection control (LADRC) scheme is proposed. Additionally, we present a generalized parallel self-assembly planning algorithm for efficient assembly among CuBoats with different DMLs. Validation is conducted through simulation within 2 scenarios across 4 distinct maps, demonstrating the performance of the self-assembly planning algorithm. Moreover, trajectory tracking tests confirm the effectiveness of the LADRC controller. Self-assembly experiments on 5 maps with different target structures affirm the algorithm's feasibility and generality. This study advances robotic self-assembly, enabling multi-robot systems to collaboratively tackle complex tasks beyond the capabilities of individual robots.
Parallel Self-assembly for a Multi-USV System on Water Surface with Obstacles
Jun 30, 2023


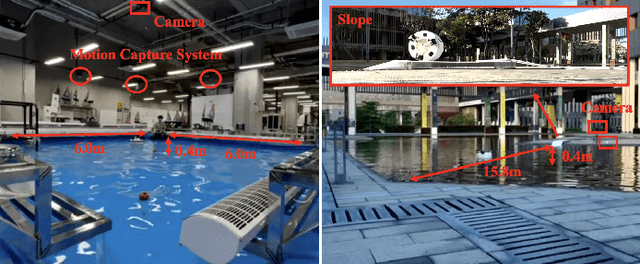
Parallel self-assembly is an efficient approach to accelerate the assembly process for modular robots. However, these approaches cannot accommodate complicated environments with obstacles, which restricts their applications. This paper considers the surrounding stationary obstacles and proposes a parallel self-assembly planning algorithm named SAPOA. With this algorithm, modular robots can avoid immovable obstacles when performing docking actions, which adapts the parallel self-assembly process to complex scenes. To validate the efficiency and scalability, we have designed 25 distinct grid maps with different obstacle configurations to simulate the algorithm. From the results compared to the existing parallel self-assembly algorithms, our algorithm shows a significantly higher success rate, which is more than 80%. For verification in real-world applications, a multi-agent hardware testbed system is developed. The algorithm is successfully deployed on four omnidirectional unmanned surface vehicles, CuBoats. The navigation strategy that translates the discrete planner, SAPOA, to the continuous controller on the CuBoats is presented. The algorithm's feasibility and flexibility were demonstrated through successful self-assembly experiments on 5 maps with varying obstacle configurations.
A Manipulator-Assisted Multiple UAV Landing System for USV Subject to Disturbance
Dec 23, 2022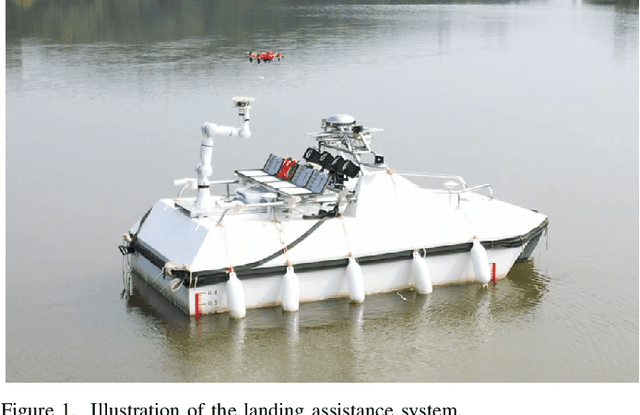
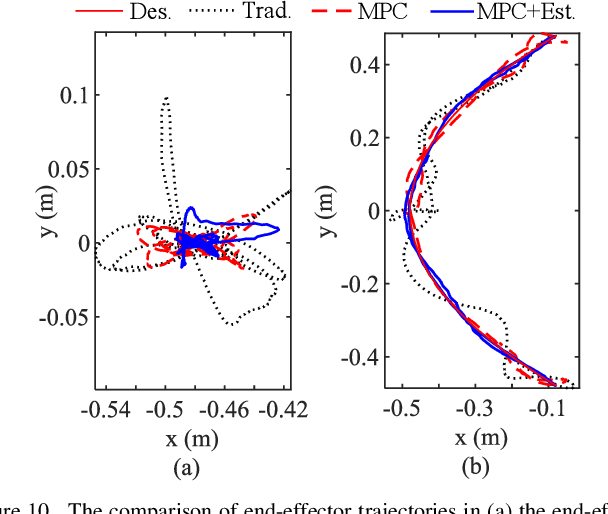
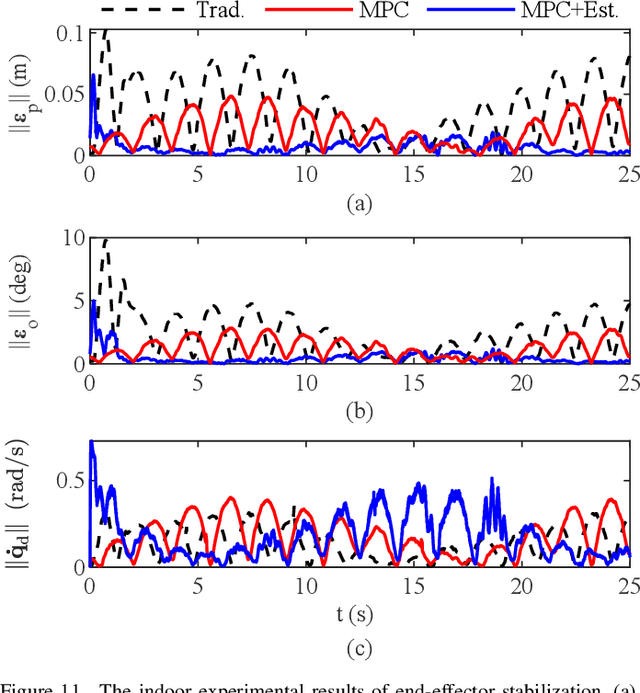
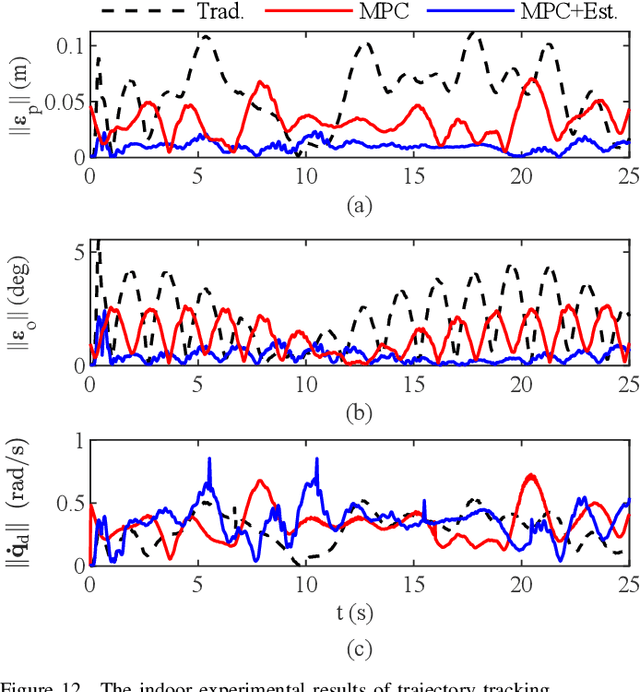
Marine waves significantly disturb the unmanned surface vehicle (USV) motion. An unmanned aerial vehicle (UAV) can hardly land on a USV that undergoes irregular motion. An oversized landing platform is usually necessary to guarantee the landing safety, which limits the number of UAVs that can be carried. We propose a landing system assisted by tether and robot manipulation. The system can land multiple UAVs without increasing the USV's size. An MPC controller stabilizes the end-effector and tracks the UAVs, and an adaptive estimator addresses the disturbance caused by the base motion. The working strategy of the system is designed to plan the motion of each device. We have validated the manipulator controller through simulations and well-controlled indoor experiments. During the field tests, the proposed system caught and placed the UAVs when the disturbed USV roll range was approximately 12 degrees.
Design and Control of the "TransBoat": A Transformable Unmanned Surface Vehicle for Overwater Construction
Dec 07, 2022



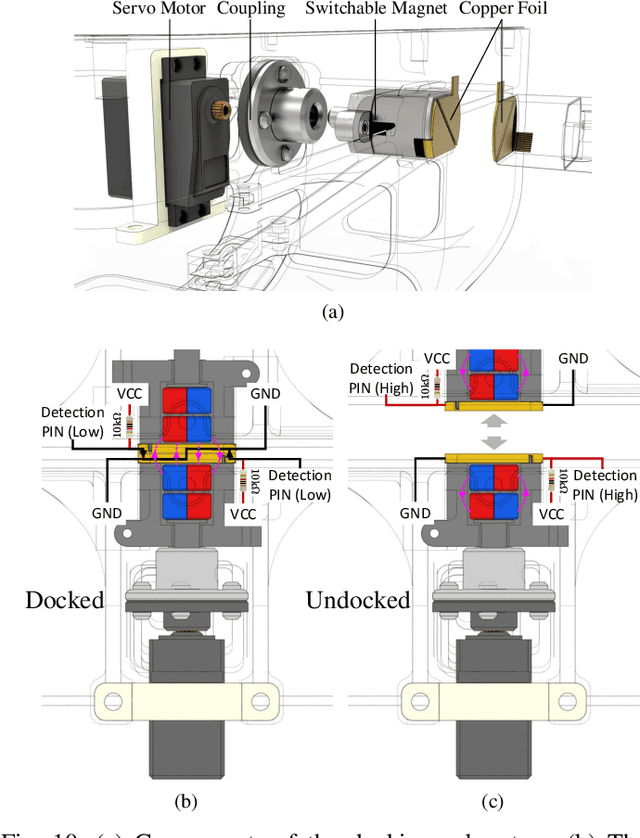
This paper presents the TransBoat, a novel omnidirectional unmanned surface vehicle (USV) with a magnetbased docking system for overwater construction with wave disturbances. This is the first such USV that can build overwater structures by transporting modules. The TransBoat incorporates two features designed to reject wave disturbances. First, the TransBoat's expandable body structure can actively transform from a mono-hull into a multi-hull for stabilization in turbulent environments by extending its four outrigger hulls. Second, a real-time nonlinear model predictive control (NMPC) scheme is proposed for all shapes of the TransBoat to enhance its maneuverability and resist disturbance to its movement, based on a nonlinear dynamic model. An experimental approach is proposed to identify the parameters of the dynamic model, and a subsequent trajectory tracking test validates the dynamics, NMPC controller and system mobility. Further, docking experiments identify improved performance in the expanded form of the TransBoat compared with the contracted form, including an increased success rate (of ~ 10%) and reduced docking time (of ~ 40 s on average). Finally, a bridge construction test verifies our system design and the NMPC control method.
Design and Verification of a Novel Triphibian Platform
Nov 30, 2022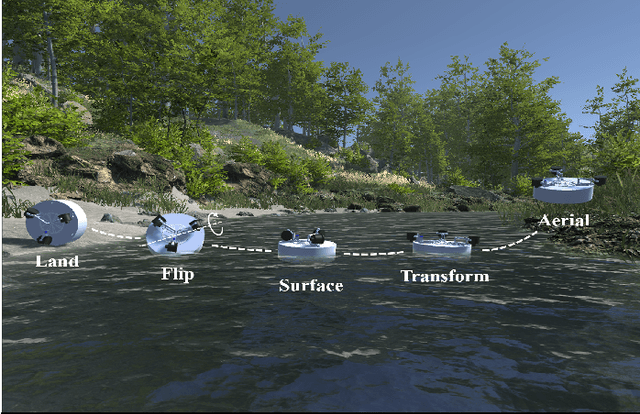
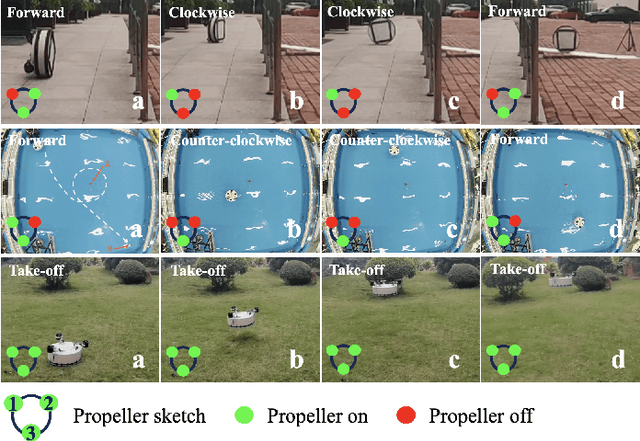
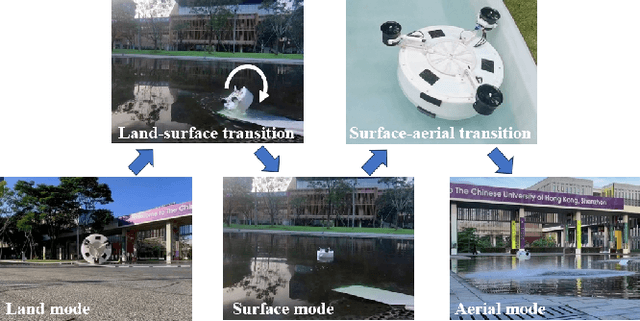
Multi-modal robots expand their operations from one working media to another, land to air for example. The majorities multi-modal robots mainly refer to platforms that operate in two different media. However, for all-terrain tasks, there is seldom research to date in the literature. In this paper, we proposed a triphibian robotic platform aiming at solving the challenges of different propulsion systems and immensely varied working media. In our design, three ducted fans are adopted to unify the propulsion system and provide the robot with driving forces to perform all-terrain operations. A morphable mechanism is designed to enable the transition between different motion modes, and specifically, a cylindrical body is implemented as the rolling mechanism in land mode. Detailed design principles of different mechanisms and the transition between various locomotion modes are analyzed in detail. Finally, a triphibian robot prototype is fabricated and tested in various working media with mono-modal and multi-modal functionalities. Experiments have verified our platform, and the results show promising adaptions for future exploration tasks in different working scenarios.
A Novel Autonomous Robotics System for Aquaculture Environment Monitoring
Nov 08, 2022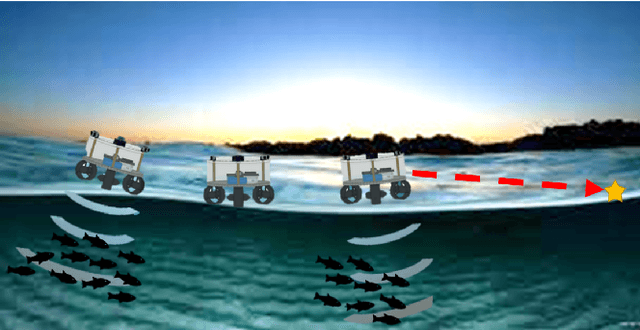
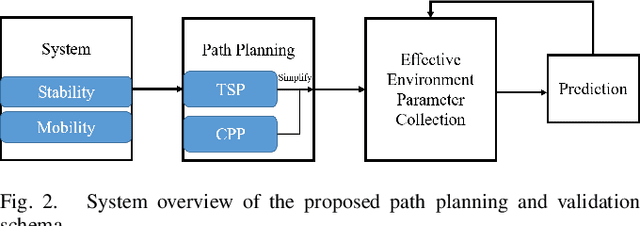
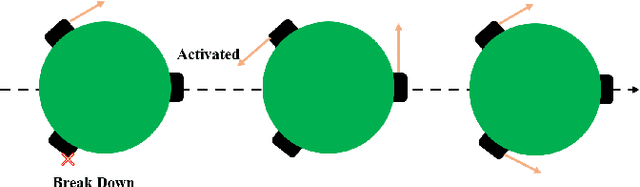
Implementing fully automatic unmanned surface vehicles (USVs) monitoring water quality is challenging since effectively collecting environmental data while keeping the platform stable and environmental-friendly is hard to approach. To address this problem, we construct a USV that can automatically navigate an efficient path to sample water quality parameters in order to monitor the aquatic environment. The detection device needs to be stable enough to resist a hostile environment or climates while enormous volumes will disturb the aquaculture environment. Meanwhile, planning an efficient path for information collecting needs to deal with the contradiction between the restriction of energy and the amount of information in the coverage region. To tackle with mentioned challenges, we provide a USV platform that can perfectly balance mobility, stability, and portability attributed to its special round-shape structure and redundancy motion design. For informative planning, we combined the TSP and CPP algorithms to construct an optimistic plan for collecting more data within a certain range and limiting energy restrictions.We designed a fish existence prediction scenario to verify the novel system in both simulation experiments and field experiments. The novel aquaculture environment monitoring system significantly reduces the burden of manual operation in the fishery inspection field. Additionally, the simplicity of the sensor setup and the minimal cost of the platform enables its other possible applications in aquatic exploration and commercial utilization.
Design and Control of A Hybrid Sailboat for Enhanced Tacking Maneuver
Nov 29, 2018
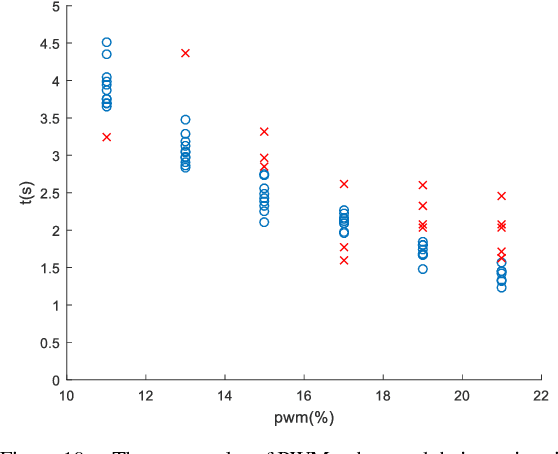
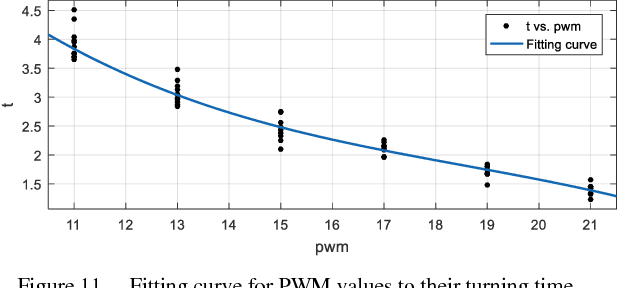
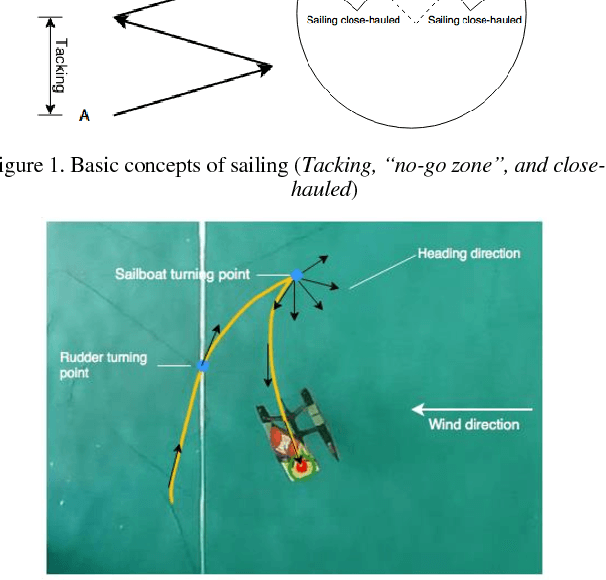
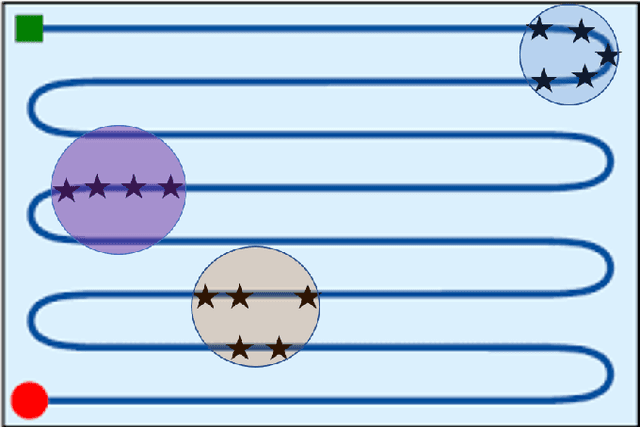
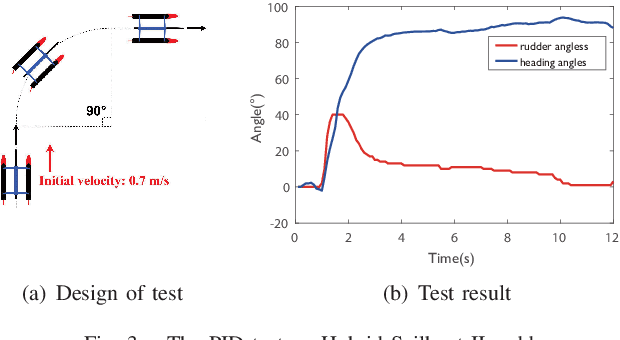
Sailing robots provide a low-cost solution to conduct the ocean missions such as marine exploration, pollution detection, and border surveillance, etc. However, compared with other propeller-driven surface vessels, sailboat suffers in complex marine wind field due to its low mobility. Especially in tacking, sailboats are required to head upwind, and need to make a zig-zag path. In this trajectory, a series of turnings, which will cross the challenging no-go zone, place significant challenge as it will reduce speed greatly and consequently result in unsuccessful turning. This paper presents a hybrid sailboat design to solve this issue. Electric propellers and control system are added to a model sailboat. We have further designed the control strategy and tuned the parameters (PWM-time) experimentally. Finally, the system and control can complete the tacking maneuver with average speed approximately 10% higher and enhanced success rate, though the sailboat weight is much heavier.
Energy Optimization of Automatic Hybrid Sailboat
Nov 28, 2018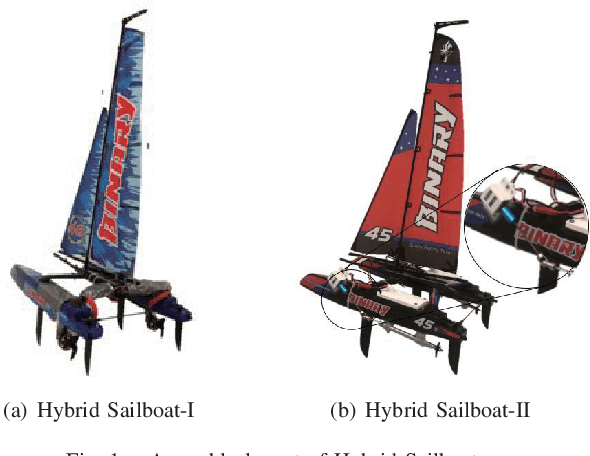

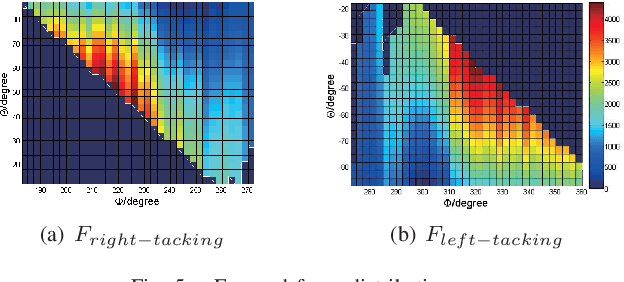
Autonomous Surface Vehicles (ASVs) provide an effective way to actualize applications such as environment monitoring, search and rescue, and scientific researches. However, the conventional ASVs depends overly on the stored energy. Hybrid Sailboat, mainly powered by the wind, can solve this problem by using an auxiliary propulsion system. The electric energy cost of Hybrid Sailboat needs to be optimized to achieve the ocean automatic cruise mission. Based on adjusted setting on sails and rudders, this paper seeks the optimal trajectory for autonomic cruising to reduce the energy cost by changing the heading angle of sailing upwind. The experiment results validate the heading angle accounts for energy cost and the trajectory with the best heading angle saves up to 23.7% than other conditions. Furthermore, the energy-time line can be used to predict the energy cost for long-time sailing.
Vehicle Pose and Shape Estimation through Multiple Monocular Vision
Nov 11, 2018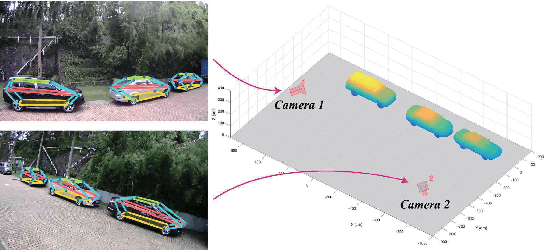
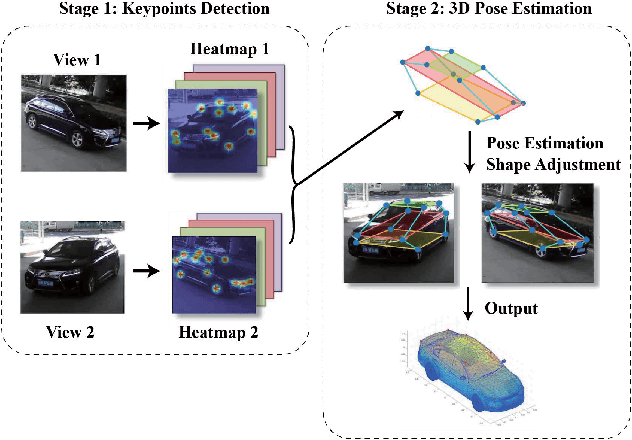
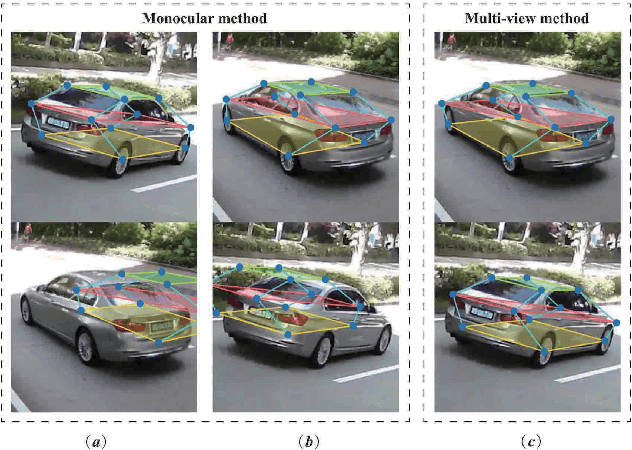
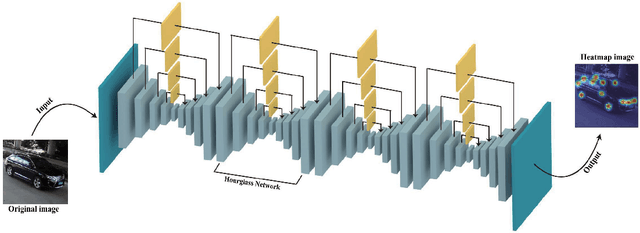
In this paper, we present an accurate approach to estimate vehicles' pose and shape from off-board multiview images. The images are taken by monocular cameras and have small overlaps. We utilize state-of-the-art convolutional neural networks (CNNs) to extract vehicles' semantic keypoints and introduce a Cross Projection Optimization (CPO) method to estimate the 3D pose. During the iterative CPO process, an adaptive shape adjustment method named Hierarchical Wireframe Constraint (HWC) is implemented to estimate the shape. Our approach is evaluated under both simulated and real-world scenes for performance verification. It's shown that our algorithm outperforms other existing monocular and stereo methods for vehicles' pose and shape estimation. This approach provides a new and robust solution for off-board visual vehicle localization and tracking, which can be applied to massive surveillance camera networks for intelligent transportation.
The Newton Scheme for Deep Learning
Oct 16, 2018
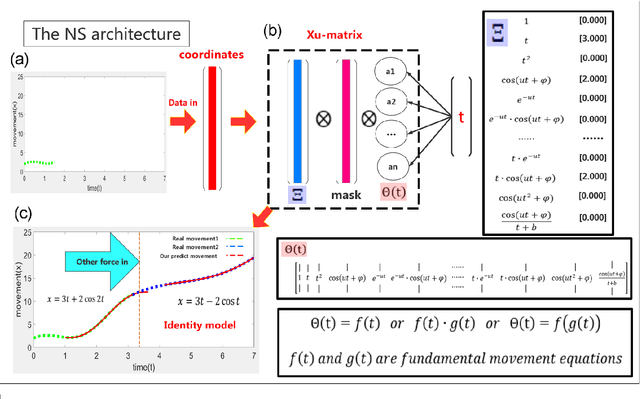
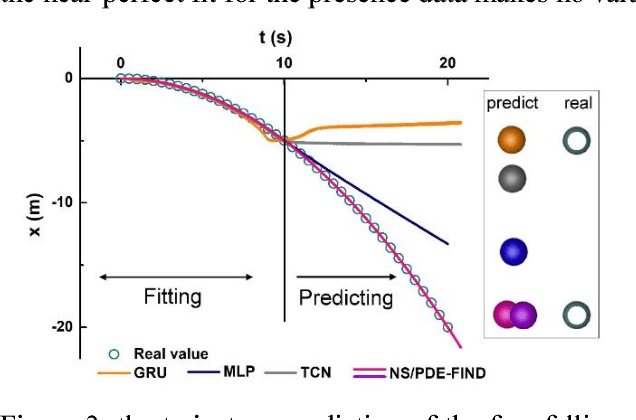
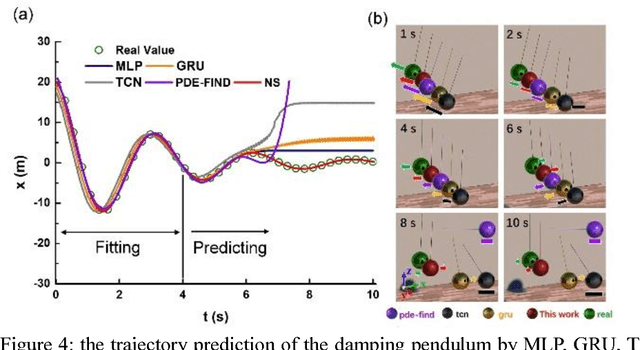
We introduce a neural network (NN) strictly governed by Newton's Law, with the nature required basis functions derived from the fundamental classic mechanics. Then, by classifying the training model as a quick procedure of 'force pattern' recognition, we developed the Newton physics-based NS scheme. Once the force pattern is confirmed, the neuro network simply does the checking of the 'pattern stability' instead of the continuous fitting by computational resource consuming big data-driven processing. In the given physics's law system, once the field is confirmed, the mathematics bases for the force field description actually are not diverged but denumerable, which can save the function representations from the exhaustible available mathematics bases. In this work, we endorsed Newton's Law into the deep learning technology and proposed Newton Scheme (NS). Under NS, the user first identifies the path pattern, like the constant acceleration movement.The object recognition technology first loads mass information, then, the NS finds the matched physical pattern and describe and predict the trajectory of the movements with nearly zero error. We compare the major contribution of this NS with the TCN, GRU and other physics inspired 'FIND-PDE' methods to demonstrate fundamental and extended applications of how the NS works for the free-falling, pendulum and curve soccer balls.The NS methodology provides more opportunity for the future deep learning advances.