 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUNCLE-Grasp: Uncertainty-Aware Grasping of Leaf-Occluded Strawberries
Jan 20, 2026Robotic strawberry harvesting is challenging under partial occlusion, where leaves induce significant geometric uncertainty and make grasp decisions based on a single deterministic shape estimate unreliable. From a single partial observation, multiple incompatible 3D completions may be plausible, causing grasps that appear feasible on one completion to fail on another. We propose an uncertainty-aware grasping pipeline for partially occluded strawberries that explicitly models completion uncertainty arising from both occlusion and learned shape reconstruction. Our approach uses point cloud completion with Monte Carlo dropout to sample multiple shape hypotheses, generates candidate grasps for each completion, and evaluates grasp feasibility using physically grounded force-closure-based metrics. Rather than selecting a grasp based on a single estimate, we aggregate feasibility across completions and apply a conservative lower confidence bound (LCB) criterion to decide whether a grasp should be attempted or safely abstained. We evaluate the proposed method in simulation and on a physical robot across increasing levels of synthetic and real leaf occlusion. Results show that uncertainty-aware decision making enables reliable abstention from high-risk grasp attempts under severe occlusion while maintaining robust grasp execution when geometric confidence is sufficient, outperforming deterministic baselines in both simulated and physical robot experiments.
Energy Optimization of Automatic Hybrid Sailboat
Nov 28, 2018
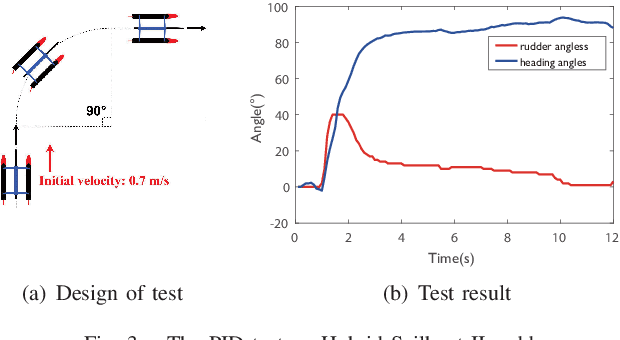

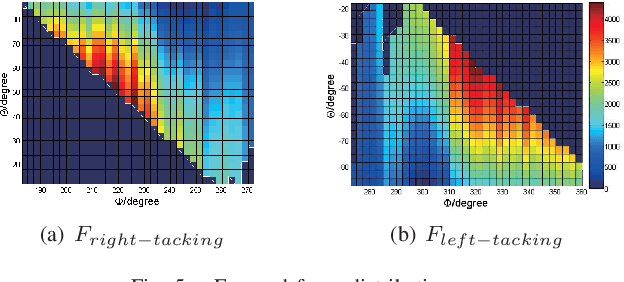
Autonomous Surface Vehicles (ASVs) provide an effective way to actualize applications such as environment monitoring, search and rescue, and scientific researches. However, the conventional ASVs depends overly on the stored energy. Hybrid Sailboat, mainly powered by the wind, can solve this problem by using an auxiliary propulsion system. The electric energy cost of Hybrid Sailboat needs to be optimized to achieve the ocean automatic cruise mission. Based on adjusted setting on sails and rudders, this paper seeks the optimal trajectory for autonomic cruising to reduce the energy cost by changing the heading angle of sailing upwind. The experiment results validate the heading angle accounts for energy cost and the trajectory with the best heading angle saves up to 23.7% than other conditions. Furthermore, the energy-time line can be used to predict the energy cost for long-time sailing.