 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMVAR: MultiVariate AutoRegressive Air Pollutants Forecasting Model
Jul 16, 2025Air pollutants pose a significant threat to the environment and human health, thus forecasting accurate pollutant concentrations is essential for pollution warnings and policy-making. Existing studies predominantly focus on single-pollutant forecasting, neglecting the interactions among different pollutants and their diverse spatial responses. To address the practical needs of forecasting multivariate air pollutants, we propose MultiVariate AutoRegressive air pollutants forecasting model (MVAR), which reduces the dependency on long-time-window inputs and boosts the data utilization efficiency. We also design the Multivariate Autoregressive Training Paradigm, enabling MVAR to achieve 120-hour long-term sequential forecasting. Additionally, MVAR develops Meteorological Coupled Spatial Transformer block, enabling the flexible coupling of AI-based meteorological forecasts while learning the interactions among pollutants and their diverse spatial responses. As for the lack of standardized datasets in air pollutants forecasting, we construct a comprehensive dataset covering 6 major pollutants across 75 cities in North China from 2018 to 2023, including ERA5 reanalysis data and FuXi-2.0 forecast data. Experimental results demonstrate that the proposed model outperforms state-of-the-art methods and validate the effectiveness of the proposed architecture.
FuXi-Air: Urban Air Quality Forecasting Based on Emission-Meteorology-Pollutant multimodal Machine Learning
Jun 09, 2025Air pollution has emerged as a major public health challenge in megacities. Numerical simulations and single-site machine learning approaches have been widely applied in air quality forecasting tasks. However, these methods face multiple limitations, including high computational costs, low operational efficiency, and limited integration with observational data. With the rapid advancement of artificial intelligence, there is an urgent need to develop a low-cost, efficient air quality forecasting model for smart urban management. An air quality forecasting model, named FuXi-Air, has been constructed in this study based on multimodal data fusion to support high-precision air quality forecasting and operated in typical megacities. The model integrates meteorological forecasts, emission inventories, and pollutant monitoring data under the guidance of air pollution mechanism. By combining an autoregressive prediction framework with a frame interpolation strategy, the model successfully completes 72-hour forecasts for six major air pollutants at an hourly resolution across multiple monitoring sites within 25-30 seconds. In terms of both computational efficiency and forecasting accuracy, it outperforms the mainstream numerical air quality models in operational forecasting work. Ablation experiments concerning key influencing factors show that although meteorological data contribute more to model accuracy than emission inventories do, the integration of multimodal data significantly improves forecasting precision and ensures that reliable predictions are obtained under differing pollution mechanisms across megacities. This study provides both a technical reference and a practical example for applying multimodal data-driven models to air quality forecasting and offers new insights into building hybrid forecasting systems to support air pollution risk warning in smart city management.
FuXi-RTM: A Physics-Guided Prediction Framework with Radiative Transfer Modeling
Mar 25, 2025



Similar to conventional video generation, current deep learning-based weather prediction frameworks often lack explicit physical constraints, leading to unphysical outputs that limit their reliability for operational forecasting. Among various physical processes requiring proper representation, radiation plays a fundamental role as it drives Earth's weather and climate systems. However, accurate simulation of radiative transfer processes remains challenging for traditional numerical weather prediction (NWP) models due to their inherent complexity and high computational costs. Here, we propose FuXi-RTM, a hybrid physics-guided deep learning framework designed to enhance weather forecast accuracy while enforcing physical consistency. FuXi-RTM integrates a primary forecasting model (FuXi) with a fixed deep learning-based radiative transfer model (DLRTM) surrogate that efficiently replaces conventional radiation parameterization schemes. This represents the first deep learning-based weather forecasting framework to explicitly incorporate physical process modeling. Evaluated over a comprehensive 5-year dataset, FuXi-RTM outperforms its unconstrained counterpart in 88.51% of 3320 variable and lead time combinations, with improvements in radiative flux predictions. By incorporating additional physical processes, FuXi-RTM paves the way for next-generation weather forecasting systems that are both accurate and physically consistent.
FuXi-2.0: Advancing machine learning weather forecasting model for practical applications
Sep 11, 2024

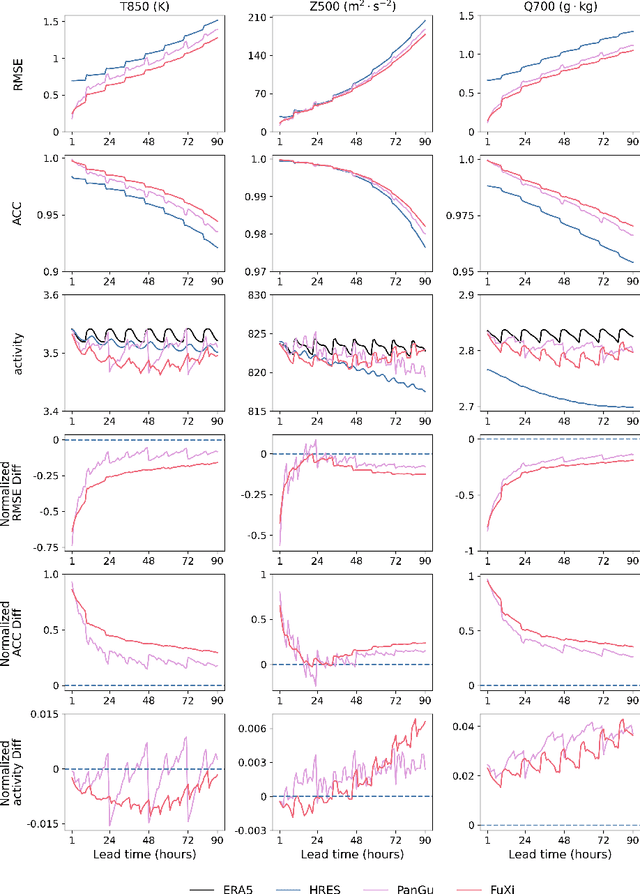
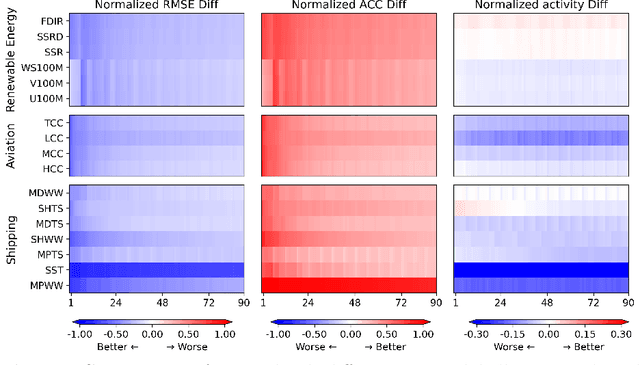
Machine learning (ML) models have become increasingly valuable in weather forecasting, providing forecasts that not only lower computational costs but often match or exceed the accuracy of traditional numerical weather prediction (NWP) models. Despite their potential, ML models typically suffer from limitations such as coarse temporal resolution, typically 6 hours, and a limited set of meteorological variables, limiting their practical applicability. To overcome these challenges, we introduce FuXi-2.0, an advanced ML model that delivers 1-hourly global weather forecasts and includes a comprehensive set of essential meteorological variables, thereby expanding its utility across various sectors like wind and solar energy, aviation, and marine shipping. Our study conducts comparative analyses between ML-based 1-hourly forecasts and those from the high-resolution forecast (HRES) of the European Centre for Medium-Range Weather Forecasts (ECMWF) for various practical scenarios. The results demonstrate that FuXi-2.0 consistently outperforms ECMWF HRES in forecasting key meteorological variables relevant to these sectors. In particular, FuXi-2.0 shows superior performance in wind power forecasting compared to ECMWF HRES, further validating its efficacy as a reliable tool for scenarios demanding precise weather forecasts. Additionally, FuXi-2.0 also integrates both atmospheric and oceanic components, representing a significant step forward in the development of coupled atmospheric-ocean models. Further comparative analyses reveal that FuXi-2.0 provides more accurate forecasts of tropical cyclone intensity than its predecessor, FuXi-1.0, suggesting that there are benefits of an atmosphere-ocean coupled model over atmosphere-only models.
Touch, press and stroke: a soft capacitive sensor skin
Jul 06, 2023Soft sensors that can discriminate shear and normal force could help provide machines the fine control desirable for safe and effective physical interactions with people. A capacitive sensor is made for this purpose, composed of patterned elastomer and containing both fixed and sliding pillars that allow the sensor to deform and buckle, much like skin itself. The sensor differentiates between simultaneously applied pressure and shear. In addition, finger proximity is detectable up to 15 mm, with a pressure and shear sensitivity of 1 kPa and a displacement resolution of 50 $\mu$m. The operation is demonstrated on a simple gripper holding a cup. The combination of features and the straightforward fabrication method make this sensor a candidate for implementation as a sensing skin for humanoid robotics applications.