 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Whole-Body Controller Based on a Simplified Template for Rendering Impedances in Quadruped Manipulators
Paper and Code
Aug 01, 2022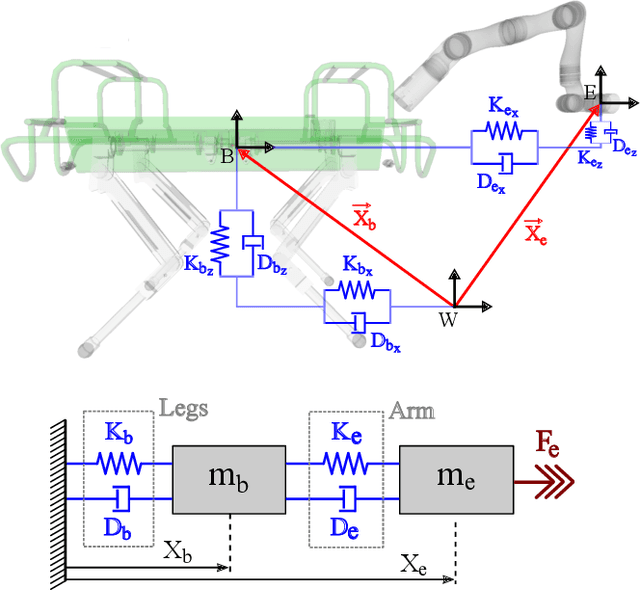
Quadrupedal manipulators require to be compliant when dealing with external forces during autonomous manipulation, tele-operation or physical human-robot interaction. This paper presents a whole-body controller that allows for the implementation of a Cartesian impedance control to coordinate tracking performance and desired compliance for the robot base and manipulator arm. The controller is formulated through an optimization problem using Quadratic Programming (QP) to impose a desired behavior for the system while satisfying friction cone constraints, unilateral force constraints, joint and torque limits. The presented strategy decouples the arm and the base of the platform, enforcing the behavior of a linear double-mass spring damper system, and allows to independently tune their inertia, stiffness and damping properties. The control architecture is validated through an extensive simulation study using the 90kg HyQ robot equipped with a 7-DoF manipulator arm. Simulation results show the impedance rendering performance when external forces are applied at the arm's end-effector. The paper presents results for full stance condition (all legs on the ground) and, for the first time, also shows how the impedance rendering is affected by the contact conditions during a dynamic gait.