 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Quadrupedal Locomotion for a Heavy Hydraulic Robot Using an Actuator Model
Jan 16, 2026The simulation-to-reality (sim-to-real) transfer of large-scale hydraulic robots presents a significant challenge in robotics because of the inherent slow control response and complex fluid dynamics. The complex dynamics result from the multiple interconnected cylinder structure and the difference in fluid rates of the cylinders. These characteristics complicate detailed simulation for all joints, making it unsuitable for reinforcement learning (RL) applications. In this work, we propose an analytical actuator model driven by hydraulic dynamics to represent the complicated actuators. The model predicts joint torques for all 12 actuators in under 1 microsecond, allowing rapid processing in RL environments. We compare our model with neural network-based actuator models and demonstrate the advantages of our model in data-limited scenarios. The locomotion policy trained in RL with our model is deployed on a hydraulic quadruped robot, which is over 300 kg. This work is the first demonstration of a successful transfer of stable and robust command-tracking locomotion with RL on a heavy hydraulic quadruped robot, demonstrating advanced sim-to-real transferability.
* 9 pages, Accepted to IEEE Robotics and Automation Letters (RA-L) 2025
Reference Free Platform Adaptive Locomotion for Quadrupedal Robots using a Dynamics Conditioned Policy
May 21, 2025This article presents Platform Adaptive Locomotion (PAL), a unified control method for quadrupedal robots with different morphologies and dynamics. We leverage deep reinforcement learning to train a single locomotion policy on procedurally generated robots. The policy maps proprioceptive robot state information and base velocity commands into desired joint actuation targets, which are conditioned using a latent embedding of the temporally local system dynamics. We explore two conditioning strategies - one using a GRU-based dynamics encoder and another using a morphology-based property estimator - and show that morphology-aware conditioning outperforms temporal dynamics encoding regarding velocity task tracking for our hardware test on ANYmal C. Our results demonstrate that both approaches achieve robust zero-shot transfer across multiple unseen simulated quadrupeds. Furthermore, we demonstrate the need for careful robot reference modelling during training, enabling us to reduce the velocity tracking error by up to 30% compared to the baseline method. Despite PAL not surpassing the best-performing reference-free controller in all cases, our analysis uncovers critical design choices and informs improvements to the state of the art.
Learning Rapid Turning, Aerial Reorientation, and Balancing using Manipulator as a Tail
Jul 15, 2024In this research, we investigated the innovative use of a manipulator as a tail in quadruped robots to augment their physical capabilities. Previous studies have primarily focused on enhancing various abilities by attaching robotic tails that function solely as tails on quadruped robots. While these tails improve the performance of the robots, they come with several disadvantages, such as increased overall weight and higher costs. To mitigate these limitations, we propose the use of a 6-DoF manipulator as a tail, allowing it to serve both as a tail and as a manipulator. To control this highly complex robot, we developed a controller based on reinforcement learning for the robot equipped with the manipulator. Our experimental results demonstrate that robots equipped with a manipulator outperform those without a manipulator in tasks such as rapid turning, aerial reorientation, and balancing. These results indicate that the manipulator can improve the agility and stability of quadruped robots, similar to a tail, in addition to its manipulation capabilities.
Learning Semantic Traversability with Egocentric Video and Automated Annotation Strategy
Jun 05, 2024For reliable autonomous robot navigation in urban settings, the robot must have the ability to identify semantically traversable terrains in the image based on the semantic understanding of the scene. This reasoning ability is based on semantic traversability, which is frequently achieved using semantic segmentation models fine-tuned on the testing domain. This fine-tuning process often involves manual data collection with the target robot and annotation by human labelers which is prohibitively expensive and unscalable. In this work, we present an effective methodology for training a semantic traversability estimator using egocentric videos and an automated annotation process. Egocentric videos are collected from a camera mounted on a pedestrian's chest. The dataset for training the semantic traversability estimator is then automatically generated by extracting semantically traversable regions in each video frame using a recent foundation model in image segmentation and its prompting technique. Extensive experiments with videos taken across several countries and cities, covering diverse urban scenarios, demonstrate the high scalability and generalizability of the proposed annotation method. Furthermore, performance analysis and real-world deployment for autonomous robot navigation showcase that the trained semantic traversability estimator is highly accurate, able to handle diverse camera viewpoints, computationally light, and real-world applicable. The summary video is available at https://youtu.be/EUVoH-wA-lA.
Legged Robot State Estimation With Invariant Extended Kalman Filter Using Neural Measurement Network
Feb 01, 2024



This paper introduces a novel proprioceptive state estimator for legged robots that combines model-based filters and deep neural networks. Recent studies have shown that neural networks such as multi-layer perceptron or recurrent neural networks can estimate the robot states, including contact probability and linear velocity. Inspired by this, we develop a state estimation framework that integrates a neural measurement network (NMN) with an invariant extended Kalman filter. We show that our framework improves estimation performance in various terrains. Existing studies that combine model-based filters and learning-based approaches typically use real-world data. However, our approach relies solely on simulation data, as it allows us to easily obtain extensive data. This difference leads to a gap between the learning and the inference domain, commonly referred to as a sim-to-real gap. We address this challenge by adapting existing learning techniques and regularization. To validate our proposed method, we conduct experiments using a quadruped robot on four types of terrain: \textit{flat}, \textit{debris}, \textit{soft}, and \textit{slippery}. We observe that our approach significantly reduces position drift compared to the existing model-based state estimator.
Imitating and Finetuning Model Predictive Control for Robust and Symmetric Quadrupedal Locomotion
Nov 04, 2023



Control of legged robots is a challenging problem that has been investigated by different approaches, such as model-based control and learning algorithms. This work proposes a novel Imitating and Finetuning Model Predictive Control (IFM) framework to take the strengths of both approaches. Our framework first develops a conventional model predictive controller (MPC) using Differential Dynamic Programming and Raibert heuristic, which serves as an expert policy. Then we train a clone of the MPC using imitation learning to make the controller learnable. Finally, we leverage deep reinforcement learning with limited exploration for further finetuning the policy on more challenging terrains. By conducting comprehensive simulation and hardware experiments, we demonstrate that the proposed IFM framework can significantly improve the performance of the given MPC controller on rough, slippery, and conveyor terrains that require careful coordination of footsteps. We also showcase that IFM can efficiently produce more symmetric, periodic, and energy-efficient gaits compared to Vanilla RL with a minimal burden of reward shaping.
ArtiGrasp: Physically Plausible Synthesis of Bi-Manual Dexterous Grasping and Articulation
Sep 07, 2023



We present ArtiGrasp, a novel method to synthesize bi-manual hand-object interactions that include grasping and articulation. This task is challenging due to the diversity of the global wrist motions and the precise finger control that are necessary to articulate objects. ArtiGrasp leverages reinforcement learning and physics simulations to train a policy that controls the global and local hand pose. Our framework unifies grasping and articulation within a single policy guided by a single hand pose reference. Moreover, to facilitate the training of the precise finger control required for articulation, we present a learning curriculum with increasing difficulty. It starts with single-hand manipulation of stationary objects and continues with multi-agent training including both hands and non-stationary objects. To evaluate our method, we introduce Dynamic Object Grasping and Articulation, a task that involves bringing an object into a target articulated pose. This task requires grasping, relocation, and articulation. We show our method's efficacy towards this task. We further demonstrate that our method can generate motions with noisy hand-object pose estimates from an off-the-shelf image-based regressor.
Learning Vehicle Dynamics from Cropped Image Patches for Robot Navigation in Unpaved Outdoor Terrains
Sep 06, 2023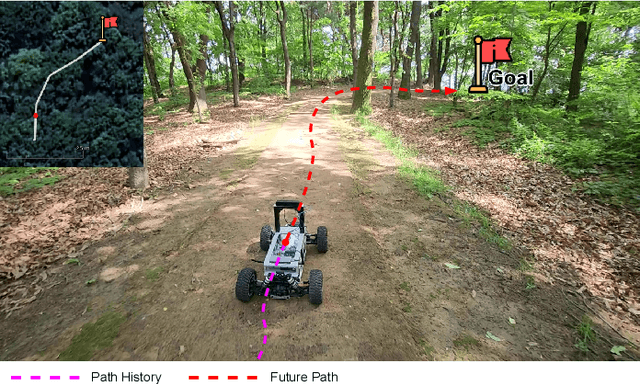

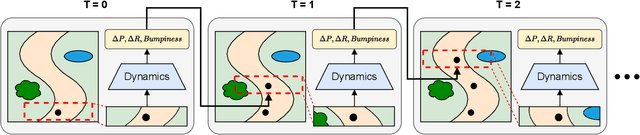
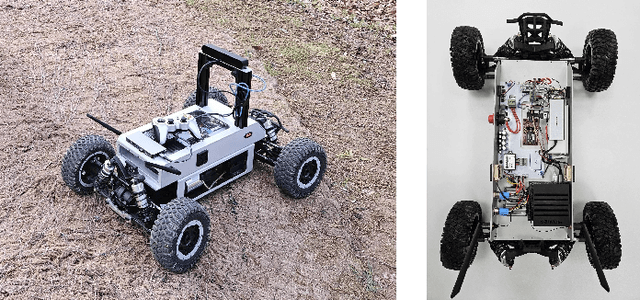
In the realm of autonomous mobile robots, safe navigation through unpaved outdoor environments remains a challenging task. Due to the high-dimensional nature of sensor data, extracting relevant information becomes a complex problem, which hinders adequate perception and path planning. Previous works have shown promising performances in extracting global features from full-sized images. However, they often face challenges in capturing essential local information. In this paper, we propose Crop-LSTM, which iteratively takes cropped image patches around the current robot's position and predicts the future position, orientation, and bumpiness. Our method performs local feature extraction by paying attention to corresponding image patches along the predicted robot trajectory in the 2D image plane. This enables more accurate predictions of the robot's future trajectory. With our wheeled mobile robot platform Raicart, we demonstrated the effectiveness of Crop-LSTM for point-goal navigation in an unpaved outdoor environment. Our method enabled safe and robust navigation using RGBD images in challenging unpaved outdoor terrains. The summary video is available at https://youtu.be/iIGNZ8ignk0.
Learning Whole-body Manipulation for Quadrupedal Robot
Sep 06, 2023



We propose a learning-based system for enabling quadrupedal robots to manipulate large, heavy objects using their whole body. Our system is based on a hierarchical control strategy that uses the deep latent variable embedding which captures manipulation-relevant information from interactions, proprioception, and action history, allowing the robot to implicitly understand object properties. We evaluate our framework in both simulation and real-world scenarios. In the simulation, it achieves a success rate of 93.6 % in accurately re-positioning and re-orienting various objects within a tolerance of 0.03 m and 5 {\deg}. Real-world experiments demonstrate the successful manipulation of objects such as a 19.2 kg water-filled drum and a 15.3 kg plastic box filled with heavy objects while the robot weighs 27 kg. Unlike previous works that focus on manipulating small and light objects using prehensile manipulation, our framework illustrates the possibility of using quadrupeds for manipulating large and heavy objects that are ungraspable with the robot's entire body. Our method does not require explicit object modeling and offers significant computational efficiency compared to optimization-based methods. The video can be found at https://youtu.be/fO_PVr27QxU.
Not Only Rewards But Also Constraints: Applications on Legged Robot Locomotion
Aug 24, 2023



Several earlier studies have shown impressive control performance in complex robotic systems by designing the controller using a neural network and training it with model-free reinforcement learning. However, these outstanding controllers with natural motion style and high task performance are developed through extensive reward engineering, which is a highly laborious and time-consuming process of designing numerous reward terms and determining suitable reward coefficients. In this work, we propose a novel reinforcement learning framework for training neural network controllers for complex robotic systems consisting of both rewards and constraints. To let the engineers appropriately reflect their intent to constraints and handle them with minimal computation overhead, two constraint types and an efficient policy optimization algorithm are suggested. The learning framework is applied to train locomotion controllers for several legged robots with different morphology and physical attributes to traverse challenging terrains. Extensive simulation and real-world experiments demonstrate that performant controllers can be trained with significantly less reward engineering, by tuning only a single reward coefficient. Furthermore, a more straightforward and intuitive engineering process can be utilized, thanks to the interpretability and generalizability of constraints. The summary video is available at https://youtu.be/KAlm3yskhvM.