 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStreamlining Admission with LOR Insights: AI-Based Leadership Assessment in Online Master's Program
Aug 07, 2025Letters of recommendation (LORs) provide valuable insights into candidates' capabilities and experiences beyond standardized test scores. However, reviewing these text-heavy materials is time-consuming and labor-intensive. To address this challenge and support the admission committee in providing feedback for students' professional growth, our study introduces LORI: LOR Insights, a novel AI-based detection tool for assessing leadership skills in LORs submitted by online master's program applicants. By employing natural language processing and leveraging large language models using RoBERTa and LLAMA, we seek to identify leadership attributes such as teamwork, communication, and innovation. Our latest RoBERTa model achieves a weighted F1 score of 91.6%, a precision of 92.4%, and a recall of 91.6%, showing a strong level of consistency in our test data. With the growing importance of leadership skills in the STEM sector, integrating LORI into the graduate admissions process is crucial for accurately assessing applicants' leadership capabilities. This approach not only streamlines the admissions process but also automates and ensures a more comprehensive evaluation of candidates' capabilities.
HyperCLOVA X Technical Report
Apr 13, 2024We introduce HyperCLOVA X, a family of large language models (LLMs) tailored to the Korean language and culture, along with competitive capabilities in English, math, and coding. HyperCLOVA X was trained on a balanced mix of Korean, English, and code data, followed by instruction-tuning with high-quality human-annotated datasets while abiding by strict safety guidelines reflecting our commitment to responsible AI. The model is evaluated across various benchmarks, including comprehensive reasoning, knowledge, commonsense, factuality, coding, math, chatting, instruction-following, and harmlessness, in both Korean and English. HyperCLOVA X exhibits strong reasoning capabilities in Korean backed by a deep understanding of the language and cultural nuances. Further analysis of the inherent bilingual nature and its extension to multilingualism highlights the model's cross-lingual proficiency and strong generalization ability to untargeted languages, including machine translation between several language pairs and cross-lingual inference tasks. We believe that HyperCLOVA X can provide helpful guidance for regions or countries in developing their sovereign LLMs.
Not Only Rewards But Also Constraints: Applications on Legged Robot Locomotion
Aug 24, 2023



Several earlier studies have shown impressive control performance in complex robotic systems by designing the controller using a neural network and training it with model-free reinforcement learning. However, these outstanding controllers with natural motion style and high task performance are developed through extensive reward engineering, which is a highly laborious and time-consuming process of designing numerous reward terms and determining suitable reward coefficients. In this work, we propose a novel reinforcement learning framework for training neural network controllers for complex robotic systems consisting of both rewards and constraints. To let the engineers appropriately reflect their intent to constraints and handle them with minimal computation overhead, two constraint types and an efficient policy optimization algorithm are suggested. The learning framework is applied to train locomotion controllers for several legged robots with different morphology and physical attributes to traverse challenging terrains. Extensive simulation and real-world experiments demonstrate that performant controllers can be trained with significantly less reward engineering, by tuning only a single reward coefficient. Furthermore, a more straightforward and intuitive engineering process can be utilized, thanks to the interpretability and generalizability of constraints. The summary video is available at https://youtu.be/KAlm3yskhvM.
Designing a Communication Bridge between Communities: Participatory Design for a Question-Answering AI Agent
Aug 01, 2023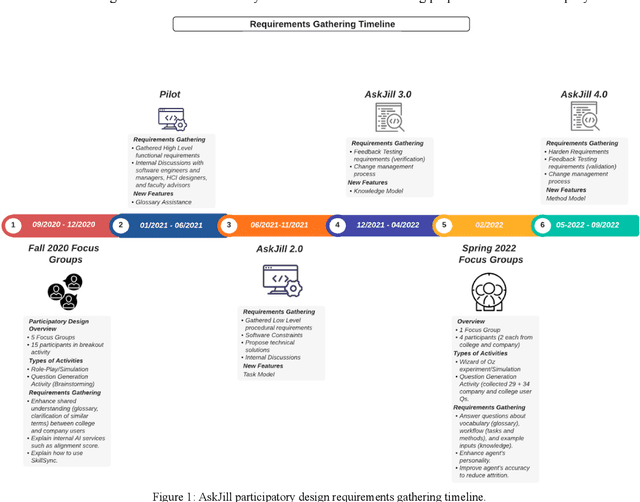


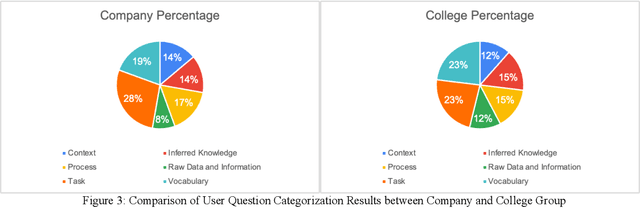
How do we design an AI system that is intended to act as a communication bridge between two user communities with different mental models and vocabularies? Skillsync is an interactive environment that engages employers (companies) and training providers (colleges) in a sustained dialogue to help them achieve the goal of building a training proposal that successfully meets the needs of the employers and employees. We used a variation of participatory design to elicit requirements for developing AskJill, a question-answering agent that explains how Skillsync works and thus acts as a communication bridge between company and college users. Our study finds that participatory design was useful in guiding the requirements gathering and eliciting user questions for the development of AskJill. Our results also suggest that the two Skillsync user communities perceived glossary assistance as a key feature that AskJill needs to offer, and they would benefit from such a shared vocabulary.
Explanation as Question Answering based on a Task Model of the Agent's Design
Jun 08, 2022

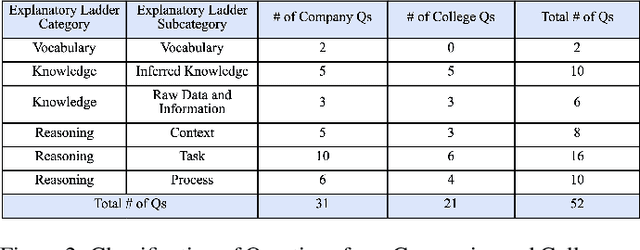
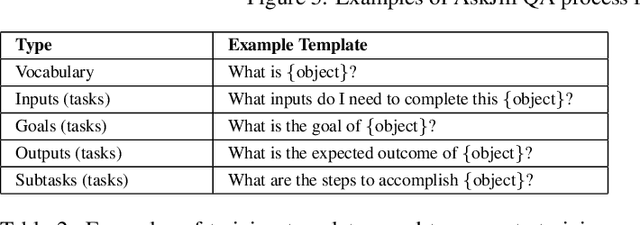
We describe a stance towards the generation of explanations in AI agents that is both human-centered and design-based. We collect questions about the working of an AI agent through participatory design by focus groups. We capture an agent's design through a Task-Method-Knowledge model that explicitly specifies the agent's tasks and goals, as well as the mechanisms, knowledge and vocabulary it uses for accomplishing the tasks. We illustrate our approach through the generation of explanations in Skillsync, an AI agent that links companies and colleges for worker upskilling and reskilling. In particular, we embed a question-answering agent called AskJill in Skillsync, where AskJill contains a TMK model of Skillsync's design. AskJill presently answers human-generated questions about Skillsync's tasks and vocabulary, and thereby helps explain how it produces its recommendations.
Compressed Learning of Deep Neural Networks for OpenCL-Capable Embedded Systems
May 20, 2019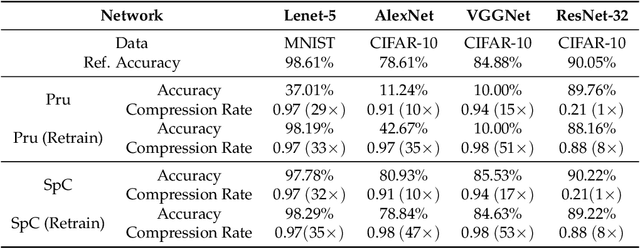
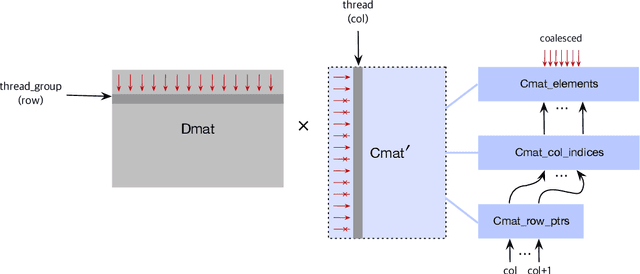
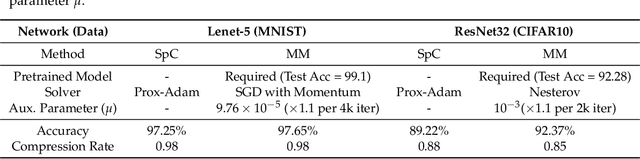
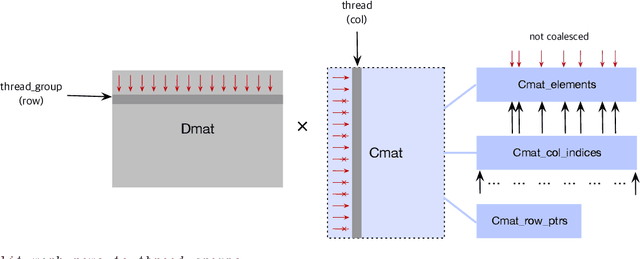
Deep neural networks (DNNs) have been quite successful in solving many complex learning problems. However, DNNs tend to have a large number of learning parameters, leading to a large memory and computation requirement. In this paper, we propose a model compression framework for efficient training and inference of deep neural networks on embedded systems. Our framework provides data structures and kernels for OpenCL-based parallel forward and backward computation in a compressed form. In particular, our method learns sparse representations of parameters using $\ell_1$-based sparse coding while training, storing them in compressed sparse matrices. Unlike the previous works, our method does not require a pre-trained model as an input and therefore can be more versatile for different application environments. Even though the use of $\ell_1$-based sparse coding for model compression is not new, we show that it can be far more effective than previously reported when we use proximal point algorithms and the technique of debiasing. Our experiments show that our method can produce minimal learning models suitable for small embedded devices.