 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperCLOVA X Technical Report
Apr 13, 2024We introduce HyperCLOVA X, a family of large language models (LLMs) tailored to the Korean language and culture, along with competitive capabilities in English, math, and coding. HyperCLOVA X was trained on a balanced mix of Korean, English, and code data, followed by instruction-tuning with high-quality human-annotated datasets while abiding by strict safety guidelines reflecting our commitment to responsible AI. The model is evaluated across various benchmarks, including comprehensive reasoning, knowledge, commonsense, factuality, coding, math, chatting, instruction-following, and harmlessness, in both Korean and English. HyperCLOVA X exhibits strong reasoning capabilities in Korean backed by a deep understanding of the language and cultural nuances. Further analysis of the inherent bilingual nature and its extension to multilingualism highlights the model's cross-lingual proficiency and strong generalization ability to untargeted languages, including machine translation between several language pairs and cross-lingual inference tasks. We believe that HyperCLOVA X can provide helpful guidance for regions or countries in developing their sovereign LLMs.
Learning Vehicle Dynamics from Cropped Image Patches for Robot Navigation in Unpaved Outdoor Terrains
Sep 06, 2023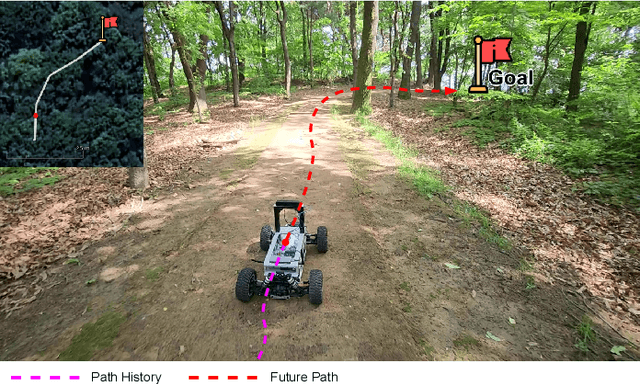

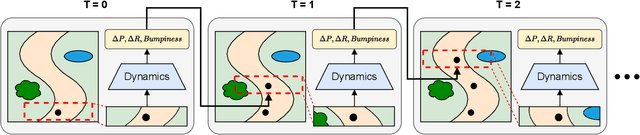
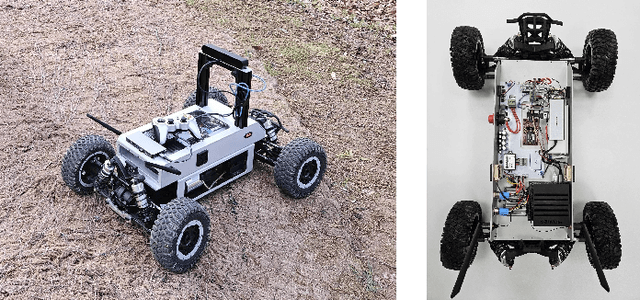
In the realm of autonomous mobile robots, safe navigation through unpaved outdoor environments remains a challenging task. Due to the high-dimensional nature of sensor data, extracting relevant information becomes a complex problem, which hinders adequate perception and path planning. Previous works have shown promising performances in extracting global features from full-sized images. However, they often face challenges in capturing essential local information. In this paper, we propose Crop-LSTM, which iteratively takes cropped image patches around the current robot's position and predicts the future position, orientation, and bumpiness. Our method performs local feature extraction by paying attention to corresponding image patches along the predicted robot trajectory in the 2D image plane. This enables more accurate predictions of the robot's future trajectory. With our wheeled mobile robot platform Raicart, we demonstrated the effectiveness of Crop-LSTM for point-goal navigation in an unpaved outdoor environment. Our method enabled safe and robust navigation using RGBD images in challenging unpaved outdoor terrains. The summary video is available at https://youtu.be/iIGNZ8ignk0.
Efficient Storage of Fine-Tuned Models via Low-Rank Approximation of Weight Residuals
May 28, 2023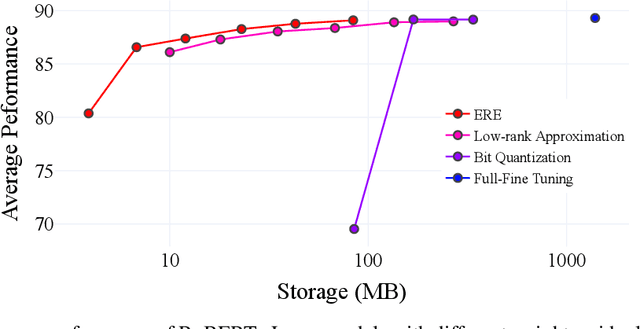
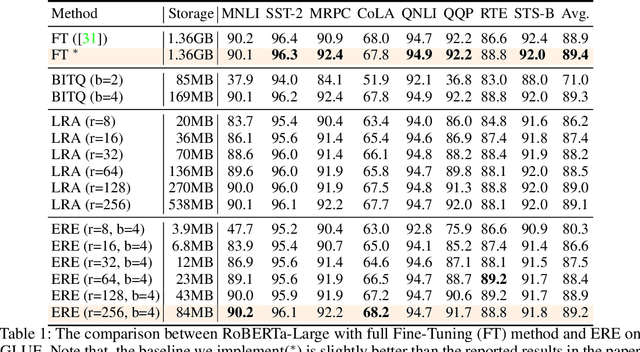
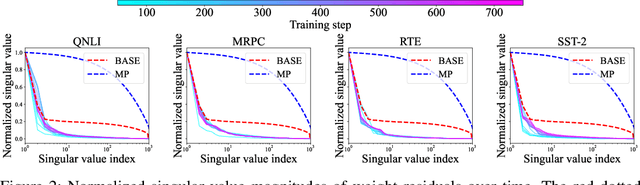
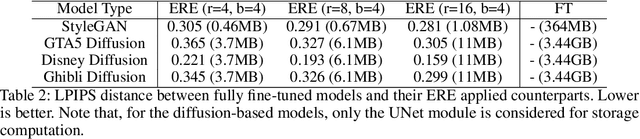
In this paper, we present an efficient method for storing fine-tuned models by leveraging the low-rank properties of weight residuals. Our key observation is that weight residuals in large overparameterized models exhibit even stronger low-rank characteristics. Based on this insight, we propose Efficient Residual Encoding (ERE), a novel approach that achieves efficient storage of fine-tuned model weights by approximating the low-rank weight residuals. Furthermore, we analyze the robustness of weight residuals and push the limit of storage efficiency by utilizing additional quantization and layer-wise rank allocation. Our experimental results demonstrate that our method significantly reduces memory footprint while preserving performance in various tasks and modalities. We release our code.