 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferentiable Mobile Display Photometric Stereo
Feb 07, 2025



Display photometric stereo uses a display as a programmable light source to illuminate a scene with diverse illumination conditions. Recently, differentiable display photometric stereo (DDPS) demonstrated improved normal reconstruction accuracy by using learned display patterns. However, DDPS faced limitations in practicality, requiring a fixed desktop imaging setup using a polarization camera and a desktop-scale monitor. In this paper, we propose a more practical physics-based photometric stereo, differentiable mobile display photometric stereo (DMDPS), that leverages a mobile phone consisting of a display and a camera. We overcome the limitations of using a mobile device by developing a mobile app and method that simultaneously displays patterns and captures high-quality HDR images. Using this technique, we capture real-world 3D-printed objects and learn display patterns via a differentiable learning process. We demonstrate the effectiveness of DMDPS on both a 3D printed dataset and a first dataset of fallen leaves. The leaf dataset contains reconstructed surface normals and albedos of fallen leaves that may enable future research beyond computer graphics and vision. We believe that DMDPS takes a step forward for practical physics-based photometric stereo.
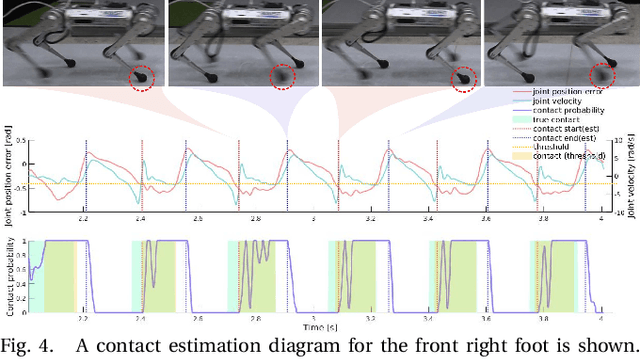
Legged Robot State Estimation With Invariant Extended Kalman Filter Using Neural Measurement Network
Feb 01, 2024



This paper introduces a novel proprioceptive state estimator for legged robots that combines model-based filters and deep neural networks. Recent studies have shown that neural networks such as multi-layer perceptron or recurrent neural networks can estimate the robot states, including contact probability and linear velocity. Inspired by this, we develop a state estimation framework that integrates a neural measurement network (NMN) with an invariant extended Kalman filter. We show that our framework improves estimation performance in various terrains. Existing studies that combine model-based filters and learning-based approaches typically use real-world data. However, our approach relies solely on simulation data, as it allows us to easily obtain extensive data. This difference leads to a gap between the learning and the inference domain, commonly referred to as a sim-to-real gap. We address this challenge by adapting existing learning techniques and regularization. To validate our proposed method, we conduct experiments using a quadruped robot on four types of terrain: \textit{flat}, \textit{debris}, \textit{soft}, and \textit{slippery}. We observe that our approach significantly reduces position drift compared to the existing model-based state estimator.
Imitating and Finetuning Model Predictive Control for Robust and Symmetric Quadrupedal Locomotion
Nov 04, 2023



Control of legged robots is a challenging problem that has been investigated by different approaches, such as model-based control and learning algorithms. This work proposes a novel Imitating and Finetuning Model Predictive Control (IFM) framework to take the strengths of both approaches. Our framework first develops a conventional model predictive controller (MPC) using Differential Dynamic Programming and Raibert heuristic, which serves as an expert policy. Then we train a clone of the MPC using imitation learning to make the controller learnable. Finally, we leverage deep reinforcement learning with limited exploration for further finetuning the policy on more challenging terrains. By conducting comprehensive simulation and hardware experiments, we demonstrate that the proposed IFM framework can significantly improve the performance of the given MPC controller on rough, slippery, and conveyor terrains that require careful coordination of footsteps. We also showcase that IFM can efficiently produce more symmetric, periodic, and energy-efficient gaits compared to Vanilla RL with a minimal burden of reward shaping.
Concurrent Training of a Control Policy and a State Estimator for Dynamic and Robust Legged Locomotion
Mar 02, 2022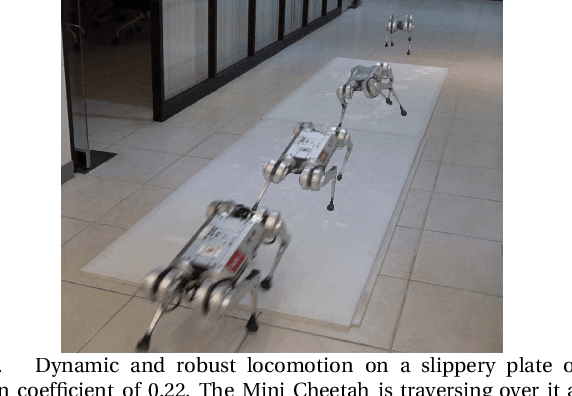
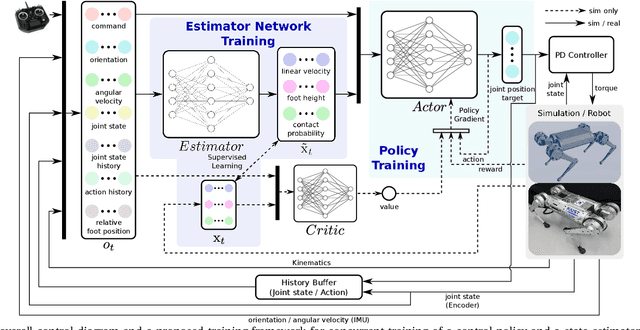
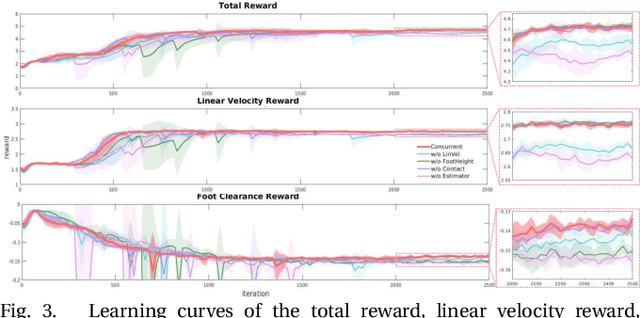
In this paper, we propose a locomotion training framework where a control policy and a state estimator are trained concurrently. The framework consists of a policy network which outputs the desired joint positions and a state estimation network which outputs estimates of the robot's states such as the base linear velocity, foot height, and contact probability. We exploit a fast simulation environment to train the networks and the trained networks are transferred to the real robot. The trained policy and state estimator are capable of traversing diverse terrains such as a hill, slippery plate, and bumpy road. We also demonstrate that the learned policy can run at up to 3.75 m/s on normal flat ground and 3.54 m/s on a slippery plate with the coefficient of friction of 0.22.
* Accepted for IEEE Robotics and Automation Letters (RA-L) and ICRA 2022