 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConcurrent Training of a Control Policy and a State Estimator for Dynamic and Robust Legged Locomotion
Paper and Code
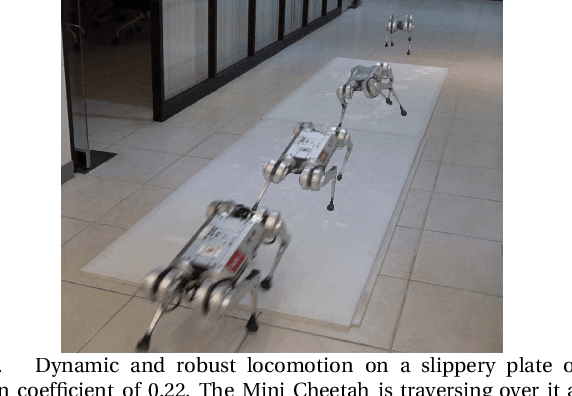
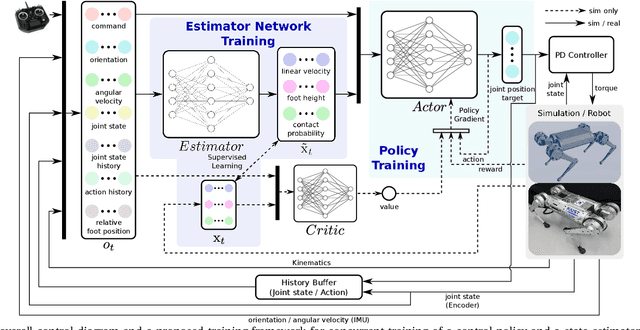
In this paper, we propose a locomotion training framework where a control policy and a state estimator are trained concurrently. The framework consists of a policy network which outputs the desired joint positions and a state estimation network which outputs estimates of the robot's states such as the base linear velocity, foot height, and contact probability. We exploit a fast simulation environment to train the networks and the trained networks are transferred to the real robot. The trained policy and state estimator are capable of traversing diverse terrains such as a hill, slippery plate, and bumpy road. We also demonstrate that the learned policy can run at up to 3.75 m/s on normal flat ground and 3.54 m/s on a slippery plate with the coefficient of friction of 0.22.