 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated identification of Ichneumonoidea wasps via YOLO-based deep learning: Integrating HiresCam for Explainable AI
Mar 17, 2026Accurate taxonomic identification of parasitoid wasps within the superfamily Ichneumonoidea is essential for biodiversity assessment, ecological monitoring, and biological control programs. However, morphological similarity, small body size, and fine-grained interspecific variation make manual identification labor-intensive and expertise-dependent. This study proposes a deep learning-based framework for the automated identification of Ichneumonoidea wasps using a YOLO-based architecture integrated with High-Resolution Class Activation Mapping (HiResCAM) to enhance interpretability. The proposed system simultaneously identifies wasp families from high-resolution images. The dataset comprises 3556 high-resolution images of Hymenoptera specimens. The taxonomic distribution is primarily concentrated among the families Ichneumonidae (n = 786), Braconidae (n = 648), Apidae (n = 466), and Vespidae (n = 460). Extensive experiments were conducted using a curated dataset, with model performance evaluated through precision, recall, F1 score, and accuracy. The results demonstrate high accuracy of over 96 % and robust generalization across morphological variations. HiResCAM visualizations confirm that the model focuses on taxonomically relevant anatomical regions, such as wing venation, antennae segmentation, and metasomal structures, thereby validating the biological plausibility of the learned features. The integration of explainable AI techniques improves transparency and trustworthiness, making the system suitable for entomological research to accelerate biodiversity characterization in an under-described parasitoid superfamily.
Viewpoint-Agnostic Grasp Pipeline using VLM and Partial Observations
Mar 09, 2026Robust grasping in cluttered, unstructured environments remains challenging for mobile legged manipulators due to occlusions that lead to partial observations, unreliable depth estimates, and the need for collision-free, execution-feasible approaches. In this paper we present an end-to-end pipeline for language-guided grasping that bridges open-vocabulary target selection to safe grasp execution on a real robot. Given a natural-language command, the system grounds the target in RGB using open-vocabulary detection and promptable instance segmentation, extracts an object-centric point cloud from RGB-D, and improves geometric reliability under occlusion via back-projected depth compensation and two-stage point cloud completion. We then generate and collision-filter 6-DoF grasp candidates and select an executable grasp using safety-oriented heuristics that account for reachability, approach feasibility, and clearance. We evaluate the method on a quadruped robot with an arm in two cluttered tabletop scenarios, using paired trials against a view-dependent baseline. The proposed approach achieves a 90% overall success rate (9/10) against 30% (3/10) for the baseline, demonstrating substantially improved robustness to occlusions and partial observations in clutter.
Evaluating Zero-Shot and One-Shot Adaptation of Small Language Models in Leader-Follower Interaction
Feb 26, 2026Leader-follower interaction is an important paradigm in human-robot interaction (HRI). Yet, assigning roles in real time remains challenging for resource-constrained mobile and assistive robots. While large language models (LLMs) have shown promise for natural communication, their size and latency limit on-device deployment. Small language models (SLMs) offer a potential alternative, but their effectiveness for role classification in HRI has not been systematically evaluated. In this paper, we present a benchmark of SLMs for leader-follower communication, introducing a novel dataset derived from a published database and augmented with synthetic samples to capture interaction-specific dynamics. We investigate two adaptation strategies: prompt engineering and fine-tuning, studied under zero-shot and one-shot interaction modes, compared with an untrained baseline. Experiments with Qwen2.5-0.5B reveal that zero-shot fine-tuning achieves robust classification performance (86.66% accuracy) while maintaining low latency (22.2 ms per sample), significantly outperforming baseline and prompt-engineered approaches. However, results also indicate a performance degradation in one-shot modes, where increased context length challenges the model's architectural capacity. These findings demonstrate that fine-tuned SLMs provide an effective solution for direct role assignment, while highlighting critical trade-offs between dialogue complexity and classification reliability on the edge.
ZeST: an LLM-based Zero-Shot Traversability Navigation for Unknown Environments
Aug 26, 2025The advancement of robotics and autonomous navigation systems hinges on the ability to accurately predict terrain traversability. Traditional methods for generating datasets to train these prediction models often involve putting robots into potentially hazardous environments, posing risks to equipment and safety. To solve this problem, we present ZeST, a novel approach leveraging visual reasoning capabilities of Large Language Models (LLMs) to create a traversability map in real-time without exposing robots to danger. Our approach not only performs zero-shot traversability and mitigates the risks associated with real-world data collection but also accelerates the development of advanced navigation systems, offering a cost-effective and scalable solution. To support our findings, we present navigation results, in both controlled indoor and unstructured outdoor environments. As shown in the experiments, our method provides safer navigation when compared to other state-of-the-art methods, constantly reaching the final goal.
A Synthetic Dataset for Manometry Recognition in Robotic Applications
Aug 24, 2025This work addresses the challenges of data scarcity and high acquisition costs for training robust object detection models in complex industrial environments, such as offshore oil platforms. The practical and economic barriers to collecting real-world data in these hazardous settings often hamper the development of autonomous inspection systems. To overcome this, in this work we propose and validate a hybrid data synthesis pipeline that combines procedural rendering with AI-driven video generation. Our methodology leverages BlenderProc to create photorealistic images with precise annotations and controlled domain randomization, and integrates NVIDIA's Cosmos-Predict2 world-foundation model to synthesize physically plausible video sequences with temporal diversity, capturing rare viewpoints and adverse conditions. We demonstrate that a YOLO-based detection network trained on a composite dataset, blending real images with our synthetic data, achieves superior performance compared to models trained exclusively on real-world data. Notably, a 1:1 mixture of real and synthetic data yielded the highest accuracy, surpassing the real-only baseline. These findings highlight the viability of a synthetic-first approach as an efficient, cost-effective, and safe alternative for developing reliable perception systems in safety-critical and resource-constrained industrial applications.
Optimizing Grasping in Legged Robots: A Deep Learning Approach to Loco-Manipulation
Aug 24, 2025

Quadruped robots have emerged as highly efficient and versatile platforms, excelling in navigating complex and unstructured terrains where traditional wheeled robots might fail. Equipping these robots with manipulator arms unlocks the advanced capability of loco-manipulation to perform complex physical interaction tasks in areas ranging from industrial automation to search-and-rescue missions. However, achieving precise and adaptable grasping in such dynamic scenarios remains a significant challenge, often hindered by the need for extensive real-world calibration and pre-programmed grasp configurations. This paper introduces a deep learning framework designed to enhance the grasping capabilities of quadrupeds equipped with arms, focusing on improved precision and adaptability. Our approach centers on a sim-to-real methodology that minimizes reliance on physical data collection. We developed a pipeline within the Genesis simulation environment to generate a synthetic dataset of grasp attempts on common objects. By simulating thousands of interactions from various perspectives, we created pixel-wise annotated grasp-quality maps to serve as the ground truth for our model. This dataset was used to train a custom CNN with a U-Net-like architecture that processes multi-modal input from an onboard RGB and depth cameras, including RGB images, depth maps, segmentation masks, and surface normal maps. The trained model outputs a grasp-quality heatmap to identify the optimal grasp point. We validated the complete framework on a four-legged robot. The system successfully executed a full loco-manipulation task: autonomously navigating to a target object, perceiving it with its sensors, predicting the optimal grasp pose using our model, and performing a precise grasp. This work proves that leveraging simulated training with advanced sensing offers a scalable and effective solution for object handling.
A Vision-Based Shared-Control Teleoperation Scheme for Controlling the Robotic Arm of a Four-Legged Robot
Aug 20, 2025In hazardous and remote environments, robotic systems perform critical tasks demanding improved safety and efficiency. Among these, quadruped robots with manipulator arms offer mobility and versatility for complex operations. However, teleoperating quadruped robots is challenging due to the lack of integrated obstacle detection and intuitive control methods for the robotic arm, increasing collision risks in confined or dynamically changing workspaces. Teleoperation via joysticks or pads can be non-intuitive and demands a high level of expertise due to its complexity, culminating in a high cognitive load on the operator. To address this challenge, a teleoperation approach that directly maps human arm movements to the robotic manipulator offers a simpler and more accessible solution. This work proposes an intuitive remote control by leveraging a vision-based pose estimation pipeline that utilizes an external camera with a machine learning-based model to detect the operator's wrist position. The system maps these wrist movements into robotic arm commands to control the robot's arm in real-time. A trajectory planner ensures safe teleoperation by detecting and preventing collisions with both obstacles and the robotic arm itself. The system was validated on the real robot, demonstrating robust performance in real-time control. This teleoperation approach provides a cost-effective solution for industrial applications where safety, precision, and ease of use are paramount, ensuring reliable and intuitive robotic control in high-risk environments.
The Impact of Feature Scaling In Machine Learning: Effects on Regression and Classification Tasks
Jun 11, 2025This research addresses the critical lack of comprehensive studies on feature scaling by systematically evaluating 12 scaling techniques - including several less common transformations - across 14 different Machine Learning algorithms and 16 datasets for classification and regression tasks. We meticulously analyzed impacts on predictive performance (using metrics such as accuracy, MAE, MSE, and $R^2$) and computational costs (training time, inference time, and memory usage). Key findings reveal that while ensemble methods (such as Random Forest and gradient boosting models like XGBoost, CatBoost and LightGBM) demonstrate robust performance largely independent of scaling, other widely used models such as Logistic Regression, SVMs, TabNet, and MLPs show significant performance variations highly dependent on the chosen scaler. This extensive empirical analysis, with all source code, experimental results, and model parameters made publicly available to ensure complete transparency and reproducibility, offers model-specific crucial guidance to practitioners on the need for an optimal selection of feature scaling techniques.
A Leaf-Level Dataset for Soybean-Cotton Detection and Segmentation
Mar 03, 2025
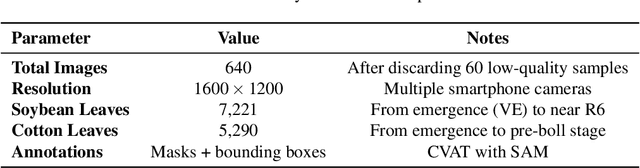
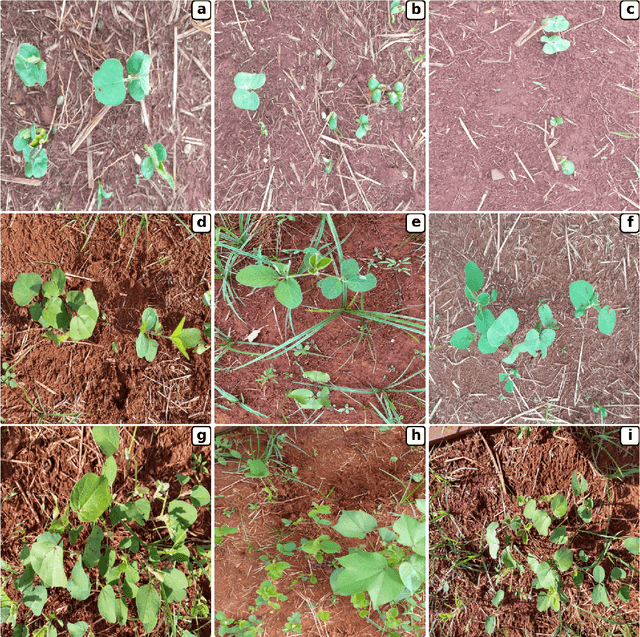
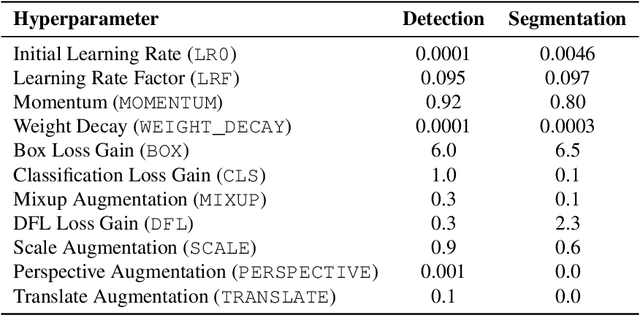
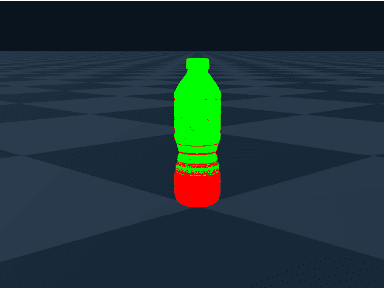
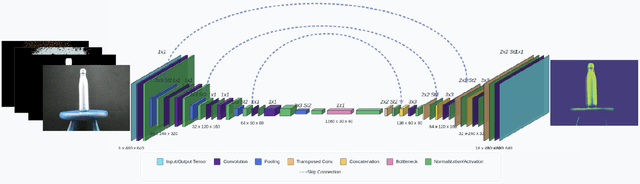
Soybean and cotton are major drivers of many countries' agricultural sectors, offering substantial economic returns but also facing persistent challenges from volunteer plants and weeds that hamper sustainable management. Effectively controlling volunteer plants and weeds demands advanced recognition strategies that can identify these amidst complex crop canopies. While deep learning methods have demonstrated promising results for leaf-level detection and segmentation, existing datasets often fail to capture the complexity of real-world agricultural fields. To address this, we collected 640 high-resolution images from a commercial farm spanning multiple growth stages, weed pressures, and lighting variations. Each image is annotated at the leaf-instance level, with 7,221 soybean and 5,190 cotton leaves labeled via bounding boxes and segmentation masks, capturing overlapping foliage, small leaf size, and morphological similarities. We validate this dataset using YOLOv11, demonstrating state-of-the-art performance in accurately identifying and segmenting overlapping foliage. Our publicly available dataset supports advanced applications such as selective herbicide spraying and pest monitoring and can foster more robust, data-driven strategies for soybean-cotton management.
CropNav: a Framework for Autonomous Navigation in Real Farms
Nov 17, 2024



Small robots that can operate under the plant canopy can enable new possibilities in agriculture. However, unlike larger autonomous tractors, autonomous navigation for such under canopy robots remains an open challenge because Global Navigation Satellite System (GNSS) is unreliable under the plant canopy. We present a hybrid navigation system that autonomously switches between different sets of sensing modalities to enable full field navigation, both inside and outside of crop. By choosing the appropriate path reference source, the robot can accommodate for loss of GNSS signal quality and leverage row-crop structure to autonomously navigate. However, such switching can be tricky and difficult to execute over scale. Our system provides a solution by automatically switching between an exteroceptive sensing based system, such as Light Detection And Ranging (LiDAR) row-following navigation and waypoints path tracking. In addition, we show how our system can detect when the navigate fails and recover automatically extending the autonomous time and mitigating the necessity of human intervention. Our system shows an improvement of about 750 m per intervention over GNSS-based navigation and 500 m over row following navigation.