 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Failure Prediction in Aircraft Fastener Assembly Using Synthetic Data in Imbalanced Datasets
May 06, 2025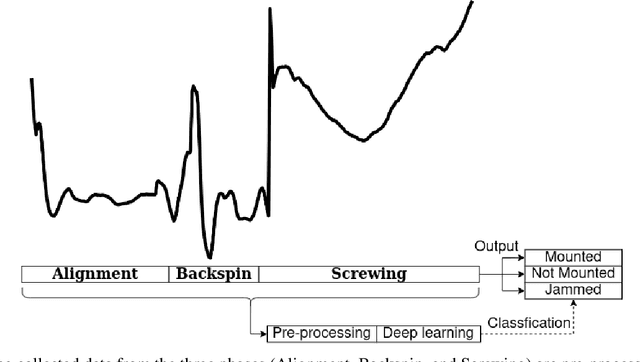

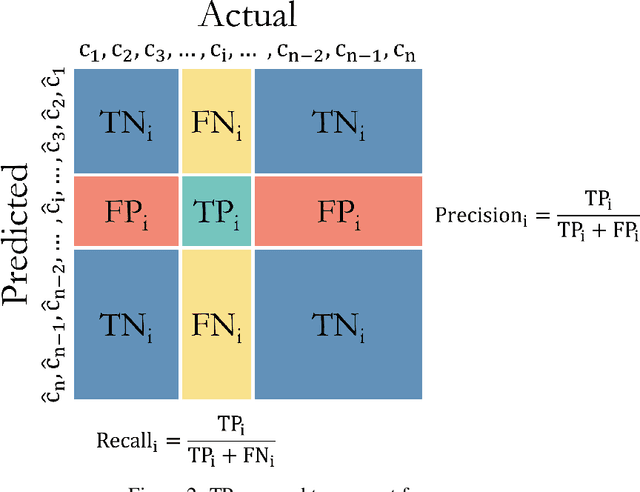
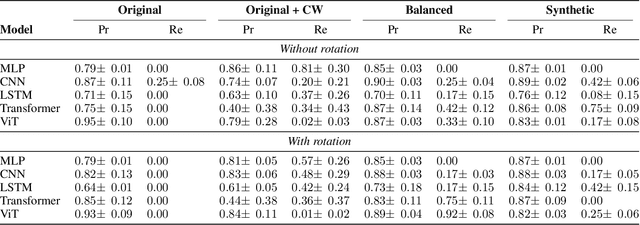
Automating aircraft manufacturing still relies heavily on human labor due to the complexity of the assembly processes and customization requirements. One key challenge is achieving precise positioning, especially for large aircraft structures, where errors can lead to substantial maintenance costs or part rejection. Existing solutions often require costly hardware or lack flexibility. Used in aircraft by the thousands, threaded fasteners, e.g., screws, bolts, and collars, are traditionally executed by fixed-base robots and usually have problems in being deployed in the mentioned manufacturing sites. This paper emphasizes the importance of error detection and classification for efficient and safe assembly of threaded fasteners, especially aeronautical collars. Safe assembly of threaded fasteners is paramount since acquiring sufficient data for training deep learning models poses challenges due to the rarity of failure cases and imbalanced datasets. The paper addresses this by proposing techniques like class weighting and data augmentation, specifically tailored for temporal series data, to improve classification performance. Furthermore, the paper introduces a novel problem-modeling approach, emphasizing metrics relevant to collar assembly rather than solely focusing on accuracy. This tailored approach enhances the models' capability to handle the challenges of threaded fastener assembly effectively.
Automatic Routing System for Intelligent Warehouses
Jul 13, 2023



Automation of logistic processes is essential to improve productivity and reduce costs. In this context, intelligent warehouses are becoming a key to logistic systems thanks to their ability of optimizing transportation tasks and, consequently, reducing costs. This paper initially presents briefly routing systems applied on intelligent warehouses. Then, we present the approach used to develop our router system. This router system is able to solve traffic jams and collisions, generate conflict-free and optimized paths before sending the final paths to the robotic forklifts. It also verifies the progress of all tasks. When a problem occurs, the router system can change the task priorities, routes, etc. in order to avoid new conflicts. In the routing simulations, each vehicle executes its tasks starting from a predefined initial pose, moving to the desired position. Our algorithm is based on Dijkstra's shortest path and the time window approaches and it was implemented in C language. Computer simulation tests were used to validate the algorithm efficiency under different working conditions. Several simulations were carried out using the Player/Stage Simulator to test the algorithms. Thanks to the simulations, we could solve many faults and refine the algorithms before embedding them in real robots.
EEG-Based Epileptic Seizure Prediction Using Temporal Multi-Channel Transformers
Sep 18, 2022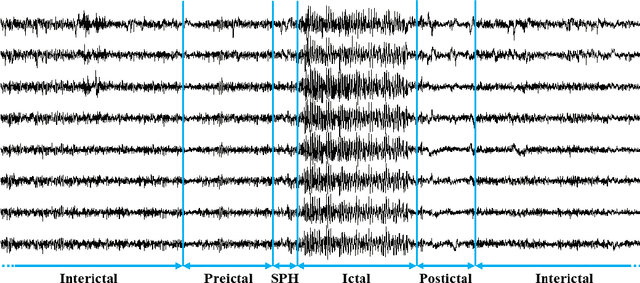

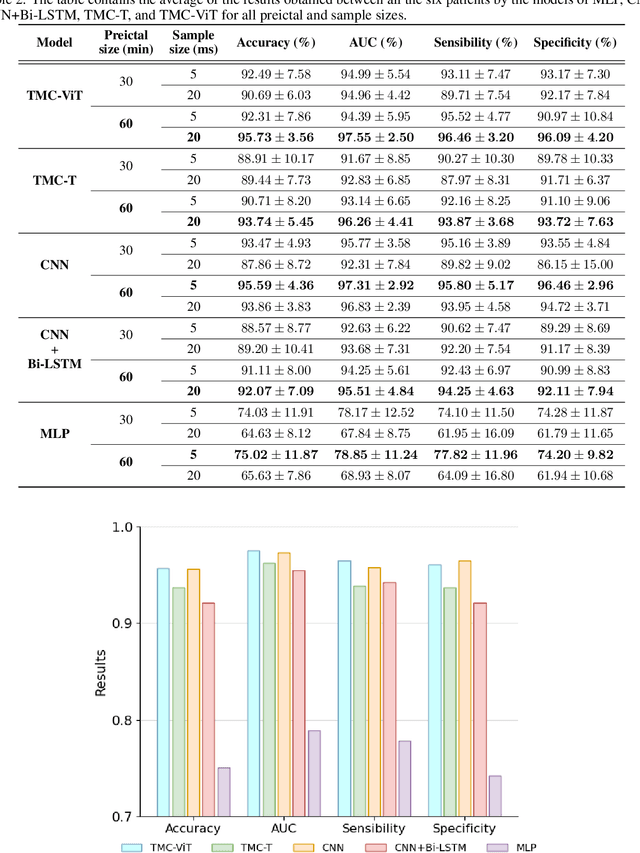

Epilepsy is one of the most common neurological diseases, characterized by transient and unprovoked events called epileptic seizures. Electroencephalogram (EEG) is an auxiliary method used to perform both the diagnosis and the monitoring of epilepsy. Given the unexpected nature of an epileptic seizure, its prediction would improve patient care, optimizing the quality of life and the treatment of epilepsy. Predicting an epileptic seizure implies the identification of two distinct states of EEG in a patient with epilepsy: the preictal and the interictal. In this paper, we developed two deep learning models called Temporal Multi-Channel Transformer (TMC-T) and Vision Transformer (TMC-ViT), adaptations of Transformer-based architectures for multi-channel temporal signals. Moreover, we accessed the impact of choosing different preictal duration, since its length is not a consensus among experts, and also evaluated how the sample size benefits each model. Our models are compared with fully connected, convolutional, and recurrent networks. The algorithms were patient-specific trained and evaluated on raw EEG signals from the CHB-MIT database. Experimental results and statistical validation demonstrated that our TMC-ViT model surpassed the CNN architecture, state-of-the-art in seizure prediction.
A hybrid model-based evolutionary optimization with passive boundaries for physical human-robot interaction
Mar 01, 2022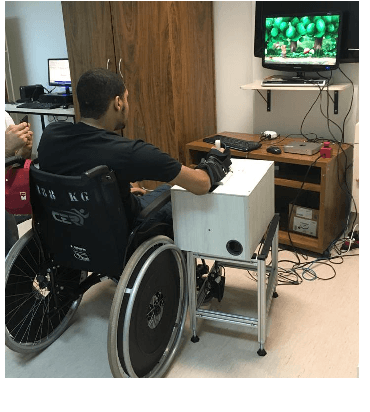
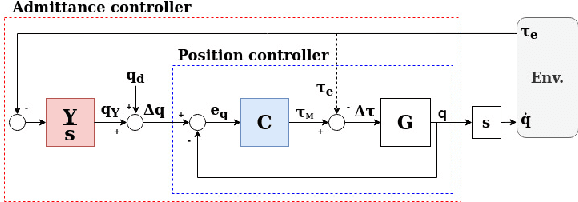
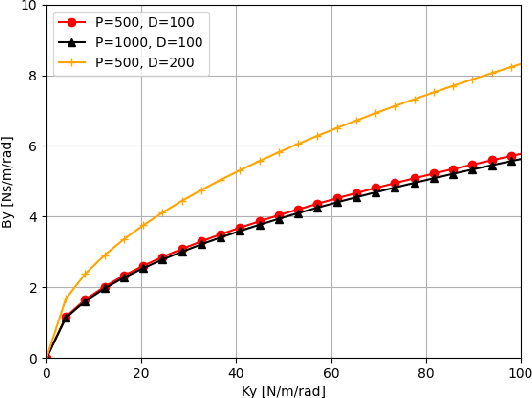
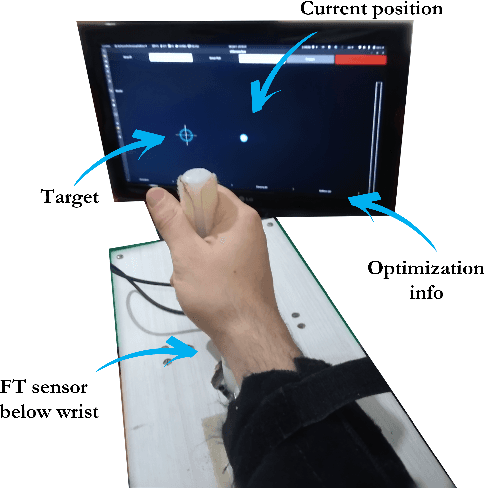
The field of physical human-robot interaction has dramatically evolved in the last decades. As a result, the robotic system's requirements have become more challenging, including personalized behavior for different tasks and users. Various machine learning techniques have been proposed to give the robot such adaptability features. This paper proposes a model-based evolutionary optimization algorithm to tune the apparent impedance of a wrist rehabilitation device. We used passivity to define boundaries for the possible controller outcomes, limiting the shared autonomy of the robot and ensuring the coupled system stability. The experiment consists of a hardware-in-the-loop optimization and a one-degree-of-freedom robot used for wrist rehabilitation. Experimental results showed that the proposed technique could generate customized passive impedance controllers for three subjects. Furthermore, when compared with a constant impedance controller, the method suggested decreased in 20\% the root mean square of interaction torques while maintaining stability during optimization.