 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Zero-Shot and One-Shot Adaptation of Small Language Models in Leader-Follower Interaction
Feb 26, 2026Leader-follower interaction is an important paradigm in human-robot interaction (HRI). Yet, assigning roles in real time remains challenging for resource-constrained mobile and assistive robots. While large language models (LLMs) have shown promise for natural communication, their size and latency limit on-device deployment. Small language models (SLMs) offer a potential alternative, but their effectiveness for role classification in HRI has not been systematically evaluated. In this paper, we present a benchmark of SLMs for leader-follower communication, introducing a novel dataset derived from a published database and augmented with synthetic samples to capture interaction-specific dynamics. We investigate two adaptation strategies: prompt engineering and fine-tuning, studied under zero-shot and one-shot interaction modes, compared with an untrained baseline. Experiments with Qwen2.5-0.5B reveal that zero-shot fine-tuning achieves robust classification performance (86.66% accuracy) while maintaining low latency (22.2 ms per sample), significantly outperforming baseline and prompt-engineered approaches. However, results also indicate a performance degradation in one-shot modes, where increased context length challenges the model's architectural capacity. These findings demonstrate that fine-tuned SLMs provide an effective solution for direct role assignment, while highlighting critical trade-offs between dialogue complexity and classification reliability on the edge.
Construction of an Impedance Control Test Bench
May 22, 2025



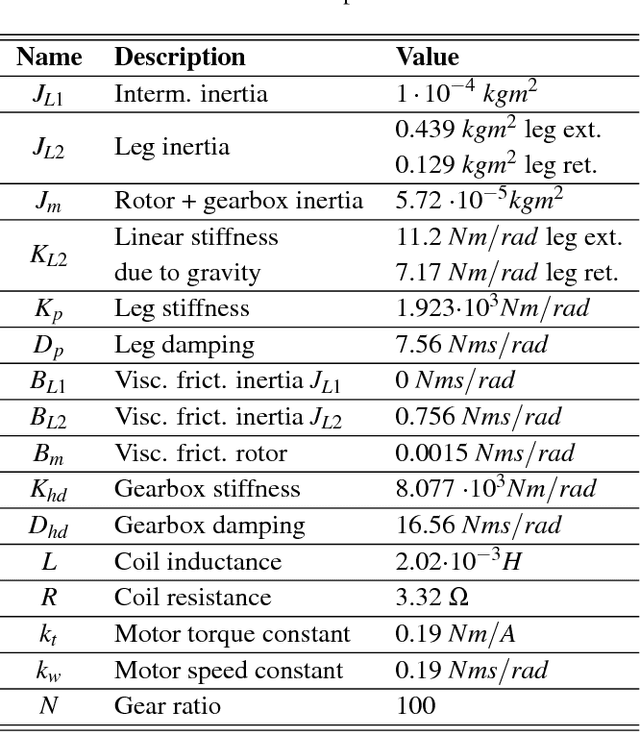
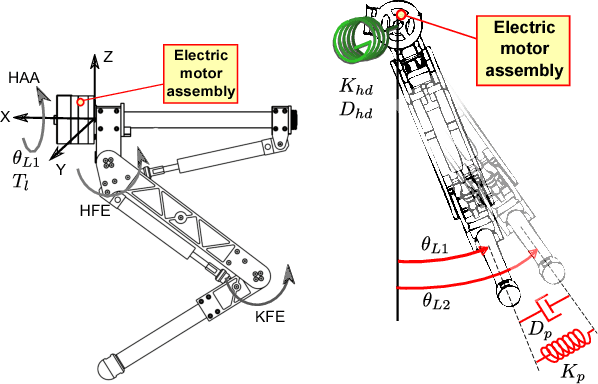
Controlling the physical interaction with the environment or objects, as humans do, is a shared requirement across different types of robots. To effectively control this interaction, it is necessary to control the power delivered to the load, that is, the interaction force and the interaction velocity. However, it is not possible to control these two quantities independently at the same time. An alternative is to control the relation between them, with Impedance and Admittance control, for example. The Impedance Control 2 Dimensions (IC2D) bench is a test bench designed to allow the performance analysis of different actuators and controllers at the joint level. Therefore, it was designed to be as versatile as possible, to allow the combination of linear and/or rotational motions, to use electric and/or hydraulic actuators, with loads known and defined by the user. The bench adheres to a set of requirements defined by the demands of the research group, to be a reliable, backlash-free mechatronic system to validate system dynamics models and controller designs, as well as a valuable experimental setup for benchmarking electric and hydraulic actuators. This article presents the mechanical, electrical, and hydraulic configurations used to ensure the robustness and reliability of the test bench. Benches similar to this one are commonly found in robotics laboratories around the world. However, the IC2D stands out for its versatility and reliability, as well as for supporting hydraulic and electric actuators.
Improving Failure Prediction in Aircraft Fastener Assembly Using Synthetic Data in Imbalanced Datasets
May 06, 2025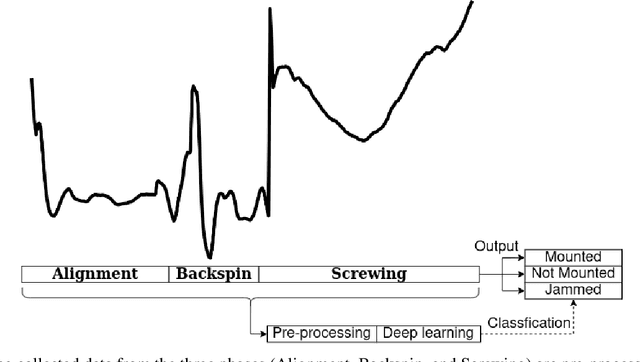

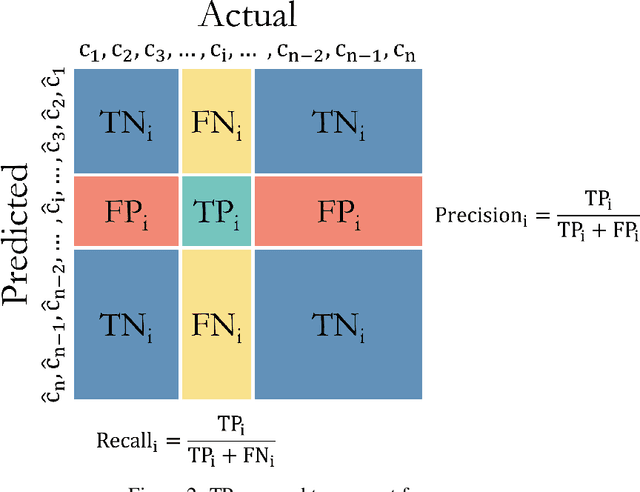
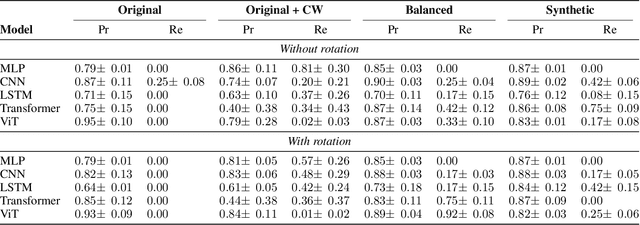
Automating aircraft manufacturing still relies heavily on human labor due to the complexity of the assembly processes and customization requirements. One key challenge is achieving precise positioning, especially for large aircraft structures, where errors can lead to substantial maintenance costs or part rejection. Existing solutions often require costly hardware or lack flexibility. Used in aircraft by the thousands, threaded fasteners, e.g., screws, bolts, and collars, are traditionally executed by fixed-base robots and usually have problems in being deployed in the mentioned manufacturing sites. This paper emphasizes the importance of error detection and classification for efficient and safe assembly of threaded fasteners, especially aeronautical collars. Safe assembly of threaded fasteners is paramount since acquiring sufficient data for training deep learning models poses challenges due to the rarity of failure cases and imbalanced datasets. The paper addresses this by proposing techniques like class weighting and data augmentation, specifically tailored for temporal series data, to improve classification performance. Furthermore, the paper introduces a novel problem-modeling approach, emphasizing metrics relevant to collar assembly rather than solely focusing on accuracy. This tailored approach enhances the models' capability to handle the challenges of threaded fastener assembly effectively.
A hybrid model-based evolutionary optimization with passive boundaries for physical human-robot interaction
Mar 01, 2022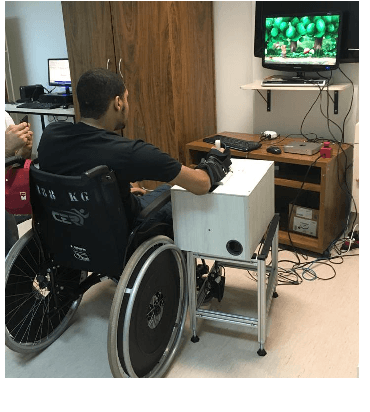
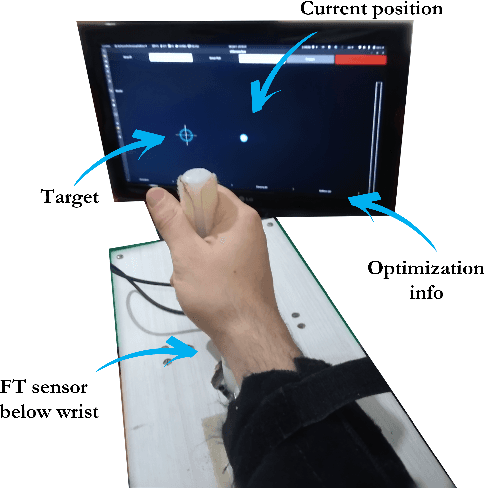
The field of physical human-robot interaction has dramatically evolved in the last decades. As a result, the robotic system's requirements have become more challenging, including personalized behavior for different tasks and users. Various machine learning techniques have been proposed to give the robot such adaptability features. This paper proposes a model-based evolutionary optimization algorithm to tune the apparent impedance of a wrist rehabilitation device. We used passivity to define boundaries for the possible controller outcomes, limiting the shared autonomy of the robot and ensuring the coupled system stability. The experiment consists of a hardware-in-the-loop optimization and a one-degree-of-freedom robot used for wrist rehabilitation. Experimental results showed that the proposed technique could generate customized passive impedance controllers for three subjects. Furthermore, when compared with a constant impedance controller, the method suggested decreased in 20\% the root mean square of interaction torques while maintaining stability during optimization.
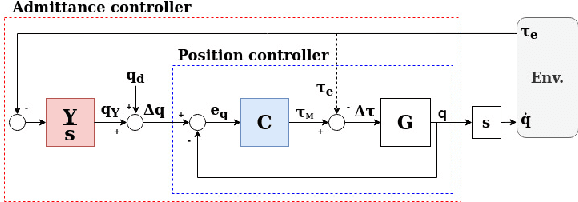
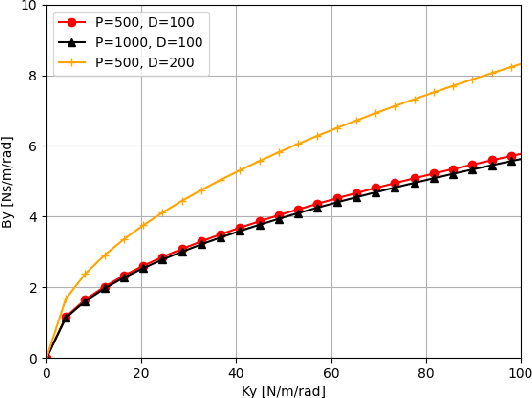
Robot Impedance Control and Passivity Analysis with Inner Torque and Velocity Feedback Loops
May 23, 2016
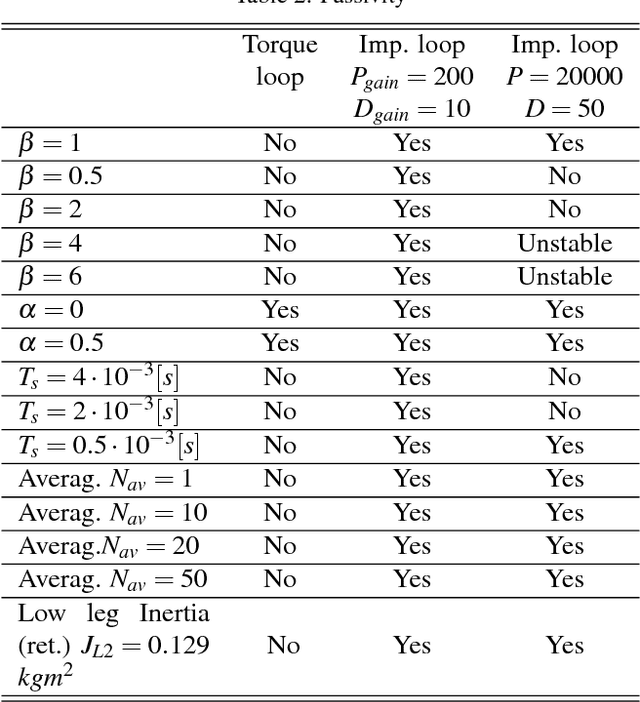
Impedance control is a well-established technique to control interaction forces in robotics. However, real implementations of impedance control with an inner loop may suffer from several limitations. Although common practice in designing nested control systems is to maximize the bandwidth of the inner loop to improve tracking performance, it may not be the most suitable approach when a certain range of impedance parameters has to be rendered. In particular, it turns out that the viable range of stable stiffness and damping values can be strongly affected by the bandwidth of the inner control loops (e.g. a torque loop) as well as by the filtering and sampling frequency. This paper provides an extensive analysis on how these aspects influence the stability region of impedance parameters as well as the passivity of the system. This will be supported by both simulations and experimental data. Moreover, a methodology for designing joint impedance controllers based on an inner torque loop and a positive velocity feedback loop will be presented. The goal of the velocity feedback is to increase (given the constraints to preserve stability) the bandwidth of the torque loop without the need of a complex controller.