 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA hybrid model-based evolutionary optimization with passive boundaries for physical human-robot interaction
Mar 01, 2022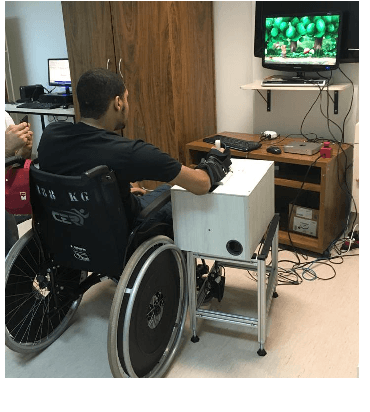
The field of physical human-robot interaction has dramatically evolved in the last decades. As a result, the robotic system's requirements have become more challenging, including personalized behavior for different tasks and users. Various machine learning techniques have been proposed to give the robot such adaptability features. This paper proposes a model-based evolutionary optimization algorithm to tune the apparent impedance of a wrist rehabilitation device. We used passivity to define boundaries for the possible controller outcomes, limiting the shared autonomy of the robot and ensuring the coupled system stability. The experiment consists of a hardware-in-the-loop optimization and a one-degree-of-freedom robot used for wrist rehabilitation. Experimental results showed that the proposed technique could generate customized passive impedance controllers for three subjects. Furthermore, when compared with a constant impedance controller, the method suggested decreased in 20\% the root mean square of interaction torques while maintaining stability during optimization.